应用于聚光太阳能发电的三臂式光跟踪系统说明书
摸按键人工调控;采用睡眠模式和工作模式两种模式,来降低系统的功耗。
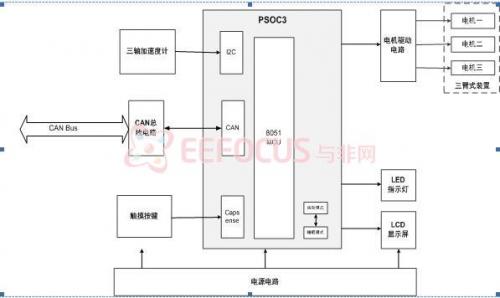
图 2?3 测角装置结构框图
反光算法:
以接收塔为原点建立空间直角坐标系O-XYZ,以镜场中任意一定日镜装置为原点建立另一空间直角坐标系O’-X’Y’Z’,其中O-XYZ与O’-X’Y’Z’之间的关系如图2-4(a)所示。
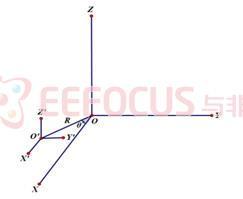
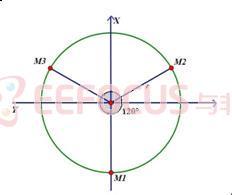
图 2?4(a)两坐标关系示意图 图 2?4(b)三根电机摆放示意图
假设太阳光从任意方向入射,利用上述太阳跟踪算法使得安装了四象限探测器的三臂装置所确定的平面垂直于太阳光,此时得出三根电机推杆的高度H1,H2,H3,再由三根电机在坐标系O-XYZ的摆放位置(如图2-4(b)所示),求出太阳光入射方向矢量
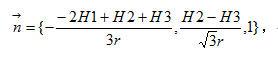 ,
,
将其归一化之后得 ,再通过坐标转换
,再通过坐标转换
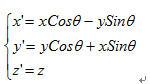
得到太阳光入射方向矢量在坐标O’-X’Y’Z’的表示
 ;
;
易知接收塔接收点在O’-X’Y’Z’坐标为
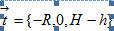 ,
,
其中h为定日镜面心高度,为设定参数值,然后对t归一化得{m,n,l}(其中n=0)。令 ;
;
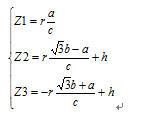
在坐标系O’-X’Y’Z’中定日镜平面方程为
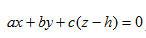
分别代入三根电机的X’Y’面坐标,即可求出三根电机的所需的绝对高度。
2.2三臂式机械结构图

图 2?6三臂机械结构比例图
3 系统性能分析
塔式太阳能热电系统主要由以下四个部分组成:定日镜装置,高温接收器,蓄热装置和发电系统。定日镜负责采集太阳能,接收器负责将采集的太阳能转换为热能,燃气轮机机组将热能最终转换为电能输出。定日镜(由平面镜,镜架和跟踪机构三部分组成)是系统最重要的两个组件之一,占系统投资最大的部分,主要涉及定日镜原理研究,平面镜聚光质量研究,跟踪技术研究以及整体机构设计等内容。
现有的,以及在研究的塔式聚光系统的定日镜都是将平面镜装在镜架上,由其跟踪装置驱动镜面随时自动跟踪太阳。而我们提出了将太阳跟踪装置和镜面反射装置分开由两个装置实现。太阳跟踪装置(简称测角装置)和镜面反射装置(简称反射装置)的结构完全一样,都是我们设计的三臂式结构。本系统在以下几个最主要的问题上全面创新,走出一条经济,实用的定日镜技术发展路线。
跟踪技术
现有的跟踪技术大部分采用微型计算机控制,少部分采用光电传感器式控制。由于跟踪技术和反光技术在一个装置上,所以无论是采用计算机程序还是其他跟踪传感器都是控制的入射光线,而对塔式系统而言,需要的是反射光线始终投射在塔顶的接收器上,尽量减小光斑溢出接收器口的机会。我们的系统中,将定日镜装置控制的是反射光线,控制更直接,精度更高,而且成本也大大降低。
不可变系统误差
双轴跟踪结构的轴线与平面镜中心交点不重合,导致装置中心不能严格限定在一个固定的空间位置而是围绕轴线做弧线运动,装置本身有不可克服的系统误差。与双轴跟踪系统相比,本系统的三臂结构的轴线与平面镜的中心重合,克服了双轴跟踪系统的系统误差。不过本系统采用四象限光源探测器来测太阳光的入射角度,那么四象限的精度就会影响本系统的跟踪精度,带来系统误差。
支撑结构
以往大都采用立式单轴方位角调整机构,需要采用很多的水泥混凝土做基础,材料耗用和成本非常可观,而且平面镜面积越大,变形将越严重,抗风性以及装置的稳定性将大大降低。本系统采用三臂式结构,使装置整体的稳定性得到了大大的提高。
4项目创新点
4.1创新的三臂滑道式机械结构
跟踪装置主要分为单轴和双轴两种,单轴跟踪结构简单,功耗低,但是跟踪精度低;双轴跟踪精度高,但是成本和功耗高。三臂滑道式机械结构可以满足一个良好的跟踪装置结构的设计要求,即功耗低,成本低,运动范围满足当地太阳位置变化的范围来实现全天跟踪;有跟踪位置的极限位置保护设计,有自锁功能防止意外情况;传动机构的设计应具有紧凑,易维护的特点,此外,主要的支撑结构应具有一定的强度设计,能够抵抗一定的风载。
4.2双跟踪系统
用将测角装置和反光装置分离出来。测角跟踪装置不仅根据电机调节时间来得到三根机械臂的长度来得到光角,同时利用加速度传感器来矫正误差,使得系统的测角精度高。此外用一个电机既可以得到光角信息,与其他测角系统相比,成本大大降低。跟踪装置根据精确的太阳光矢信息,以及反光跟踪算法调节反射光使之聚焦于接收器上,聚焦精度好。
4.3塔式聚光发电
本系统立足于塔式聚光发电系统,通过改进塔式聚光发电的跟踪系统来实现将太阳光始终聚焦在接受塔处,使得聚光发电不受太阳