应用于聚光太阳能发电的三臂式光跟踪系统说明书
,完成聚光的功能。此外,通过触摸按键,我们对LCD进行控制,使LCD能显示系统的工作状态,当时太阳光的角度以及太阳光强度。测角装置上的EEPROM将这些数据存储起来,并将这些数据传给上位机,在上位机上可绘制出当天或近几天太阳光角与太阳光强随时间的变化曲线。此外,系统可根据环境中的光强,自动调节工作模式,当光强太弱,发电量比耗电量还大时,系统便进入休眠状态,以减小系统的功耗。整个系统中,硬件电路是系统功能得以实现的基础,软件是系统的核心,机械结构则是系统功能的执行者。根据这些要求,我们项目主要研究的内容有:
三臂式机械结构研究 太阳光测角算法研究 反光跟踪算法研究 系统软硬件实现2.1.1测角模块
本系统测角模块的原理如下图2-1所示。四象限光源探测器的四路输出将信号直接传给PSoC的AD,使模拟信号转换为数字信号,然后交给MCU处理,MCU将信号滤波,根据算法,生成电机驱动电路的调节指令,转动相应的电机来调节电动推杆的高度,使端面与太阳光垂直。根据推杆的升降时间以及三轴加速度计测得推杆的高度,从而得到太阳光光矢信息。通过CAN电路将光矢信息传给反光装置。系统设置了睡眠模式和工作模式两种模式,在光强弱的情况下就进入睡眠模式以减小系统功耗。系统采用触摸按键进行人工调试,采用触摸模块可使系统稳定性高,使用方便。通过LCD与LED来显示系统的工作状态,当前太阳光角度,太阳光强度等信息。通过EEPROM存储器将太阳光角度,太阳光强度等信息存储起来,供系统分析,当地太阳光照度等情况分析用。
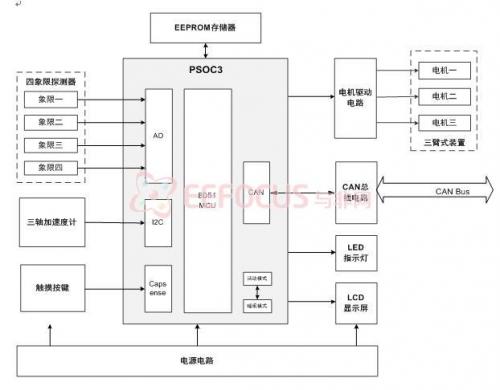
图 2?1测角模块结构框图
测角算法:
假设从四象限探测器输出的电压分别为 v1,v2,v3,v4。我们引入变量 x,y 分别表示在 x轴和y轴方向上的真实偏移,dx,dy分别表示在x轴和y轴方向上的偏大估计。如图 2-2所示。
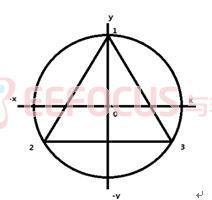
图 2?2测角算法示意图
利用和差法,可得:
dx=(v1+v4-v2-v3)/(v1+v2+v3+v4),
dy=(v1+v2-v3-v4)/(v1+v2+v3+v4),
通过解四象限探测器光路数学模型得出x与dx、y与dy之间的关系式,为:
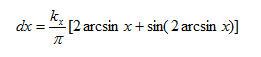 (1)
(1)
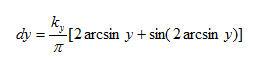 (2)
(2)
用MATLAB拟合可以得出x和y曲线特征值。将特征值储存在PSOC的Flash Memory中,在目标方位检测电路给出待求点dx和dy的值后,将其作为自变量,带入到已知特征值的曲线方程,得出的因变量x和y.。我们为偏移量x,y分别设定一个阈值Mx,My。只有当偏移量超过了相应的阈值后才进行调节。L1、L2、L3分别表示三根机械手臂。通过这种算法,我们可以保持坐标原点O不动。x和y可能的9中情况和对应的调节方式如表2-1所示
表格2?1 调节方式对照表
|
| L1 | L2 | L3 |
|---|---|---|---|
| y>My, x>Mx | 上升4个单位长度 | 下降5个单位长度 | 上升1个单位长度 |
| y>My, x<-Mx | 上升4个单位长度 | 上升1个单位长度 | 下降5个单位长度 |
| y>My, -Mx<x<Mx | 上升4个单位长度 | 下降2个单位长度 | 下降2个单位长度 |
| y<-My, x>Mx | 下降4个单位长度 | 下降1个单位长度 | 上升5个单位长度 |
| y<-My, x<-Mx | 下降4个单位长度 | 上升5个单位长度 | 下降1个单位长度 |
| y<-My, -Mx<x<Mx | 下降4个单位长度 | 上升2个单位长度 | 上升2个单位长度 |
| -My<y<My, x>Mx | 保持不变 | 下降3个单位长度 | 上升3个单位长度 |
| -My<y<My, x<-Mx | 保持不变 | 上升3个单位长度 | 下降3个单位长度 |
| -My<y<My,-Mx<x<Mx | 保持不变 | 保持不变 | 保持不变 |
2.1.2反光模块:
本系统反光模块的系统框图如图2-3所示。反光模块通过CAN电路来接收太阳光角信息,从而通过MCU下达的指令,控制电机驱动电路调节电机转动,使镜子始终把光能反射到接受塔上。系统采用三轴加速度传感器检测装置的电动推杆高度,以防止电动推杆伸到底或伸到头而损伤电机;采用LED和LCD显示系统的工作状态,通过触