采用创新的模拟PFC控制器应对最新生态设计挑战
创新的电流控制频率反走(CCFF)技术使模拟功率因数校正(PFC)控制器能够在完整负载范围内提供高能效,其它已知优势还包括快速瞬态响应及简化电路设计。
简介:高能效PFC
诸如欧盟耗能产品(ErP)指令等严格生态设计法规要求电视、膝上型及台式电脑、荧光灯镇流器和LED照明驱动器等日常使用的产品提供极高能效。为了确保在产品级通过必要的批准,如在欧盟销售的商品须获得强制的CE标志,新设计必须符合包括待机、部分负载或满载条件的宽负载范围能效目标。
此外,设计人员也面临符合以有竞争力的价格提供高性能标准之市场需求的压力。控制功率因数校正(PFC)(功率高于70 W之应用强制要求PFC)的集成电路(IC)集成越来越多的功能,通过减少电源元件数量及降低对电容等大体积、规格过高的器件的依赖,可以帮助满足此要求。
有源PFC补偿由电源导致、会增加电气网络内热量及干扰的线路电流谐波失真。由于对能效的顾虑已经延伸,不仅涵盖待机及降低功率模式,还包括满额功率模式,传统PFC控制工作的缺点就变得越来越受注目。采用临界导电模式(CrM)工作的传统PFC控制器的能效在电源轻载工作时往往会降低,如电器在待机模式下就是如此。
转向数字PFC,还是不转?
某些芯片制造商已将数字PFC作为克服此局限的出路。通过将感测模拟电压转换至数字域,然后应用信号处理算法,数字控制器就不受线性特性的限制,在任何负载条件下都可以合成极优的输出波形。不同模式下的能效取决于芯片制造商开发的算法品质。市场上近期推出的数字PFC控制器还集成了通过I2C等标准连接实现的诊断及用户可编程等功能。
然而,有关模拟PFC将被数字PFC替代的传言在过去已经被证明是夸大其辞。在这种情况下,要想削弱传统模拟PFC控制器的一些关键优势可能还为时尚早。虽然制造商们声称数字PFC控制器相比模拟PFC控制器具有成本优势,特别是在系统级考虑成本时,但市场上的模拟PFC控制器的价格比最新数字PFC控制器更低。某些数字PFC控制器自推出第一代产品以来,价格实际上已经上涨。此外,最新模拟PFC控制器中集成的保护电路及输入欠压检测等特性能够提供仅使用极少外部元件的更具价格竞争力的设计。
最新世代的模拟PFC控制器通过采用电流控制频率反走(CCFF)等创新技术,能够提供更高的能效。安森美半导体的NCP1611和NCP1612 PFC控制器中应用了这种新的工作模式。CCFF使控制器在宽负载内维持高能效,包括轻载和待机工作条件,以及较高负载条件。这些控制器还应用了增强型特性,改善故障处理及瞬态响应,并支持不同偏置场景,为设计人员提供额外的灵活性。
提升所有负载条件下的能效
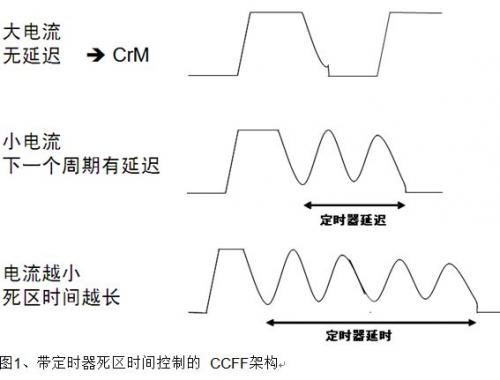
在CCFF架构下,电路在大电流条件下采用临界导电模式(CrM)工作。在重负载条件下临近过零点时会出现低电流电平,而轻载条件下完整正弦方波皆为低电流电平;而在低电流电平时,控制器进入频率受控不连续工作模式。定时器会插入死区时间,延迟启动,直到从表征输入电流的感测电压上升至内部产生的精密2.5 V"斜坡阈值"之斜坡所需时间用完。因此,较低输入电流的死区时间更长。图1通过不同负载条件下升压MOSFET的电压波形显示了CCFF的工作原理。
定时器控制死区时间而非开关周期/关闭时间。当电流为零时,反走频率被限制为最低的20 kHz。控制器通过这种方式能够将额定负载及轻载条件下的能效均提升至最高。特别是待机损耗被降至最低。通过延迟MOSFET导通的时间点直至漏极-源极电压到达其谷底,进一步降低了损耗。谷底开关还将产生的电磁干扰(EMI)减至最少。另一项优势是系统不会在谷底之间停滞。由于死区时间不受电流周期时长变化的影响,谷底导通的发生不带有迟滞。
可以将CCFF工作模式与负载下降时开关频率上升的传统CrM作比较。极轻负载时,传统CrM控制器可能进入突发(burst)模式,产生可听噪声。相比较而言,CCFF控制器的较低频率被钳位至高于可听频率范围,因而防止产生可听噪声。
与频率控制临界导电模式(FCCrM)控制器类似,CCFF控制器的内部电路能够提供接近1的功率因数,即便是在开关频率降低的情况下。此外,跳周期模式使PFC能够跳过电流极低时线路过零点附近的周期,提供优化的能效。这就避免了电源转换能效特别低时的电路工作。应当注意的是,这种模式会产生一些电流波形失真。因此,跳周期模式不应当用于要求极高功率因数的应用。图2比较了CCFF控制器在跳周期模式及非跳周期模式与传统CrM控制的能效。

增强控制器功能
集成快速线路/负载瞬态补偿进一步增强了PFC性能,避免由负载或输入电压突然变化
模拟PFC控制器 CCFF控制器 NCP1611 相关文章:
- 大幅优化离线电源轻载能效的安森美半导体创新PFC控制方案(04-04)