高加速度条件下的时钟源管理设计
引言
在高加速度环境下,由于石英晶体振荡器本身的机械特性,它在100000g的情况下,自身就有损坏的可能。而硅振荡器启动一致和快速,不像RC电路那样易受到性能欠佳问题的阻扰。标准的硅片制造和组装技术意味着,硅振荡器本身不受冲击和震动影响,也没有磨损问题。
为了降低晶振的加速度敏感度,已经开展了大量的研究工作,提出了各种改进和补偿的方法,概括起来分为两类:无源法和有源法。
无源法有选用新切型晶体、改进品体结构安装和加工工艺、双晶体配对,以及振动隔离措施等。有源法是将振动效应通过传感器、放大器反馈到振荡电路或晶体上去,包括控制变容管补偿法和控制晶体极化效应补偿法,还有通过单片机控制其电压来调节晶振的频率。而以上这些方法普遍存在系统复杂、实现困难、限制严格等弊端,无法普及推广。
为此,提出采用硅振荡器和晶振在高加速度下转换的方法实现两种振荡器优势互补,采用频率合成的方法给出转换的条件,并通过实验来验证其可行性。
1 实验原理
选用的晶体振荡器与硅振荡器的数学模型为:
u1(t)=U1cos(w1t+θ1) (1)
u2(t)=U2cos(w2t+θ2) (2)
通过锁相环和低通滤波器后的输出为:
当u1(t)和u2(t)的相位差为0时,(w2-w1)t+(θ2-θ1)为0,此时的uo(t)的幅值为最大。而要让u1(t)和u2(t)能平稳转换,则要保证它们的相位差为,即使uo(t)的幅值为时开始转换,此时选用电压比较器来控制。
2 转换电路设计
先将uo(t)接正极,接负极,作为电压比较器的两个输入。当uo(t)大于时,输出C为0,反之则为1。外部榆测信号C是否为0,若为0,则外部信号G给一个上升沿信号作为切换允许的条件,并停止检测C的状态,此时选择硅振荡器为输出时钟。选择器的选择信号S由D触发器来产生,其中D触发器的逻辑关系为当C为0、G为上升沿时输出Q为Q’,当C为1、G为上升沿时输出Q为Q,所以D触发器的输人为C’Q’+CQ。转换框图如图1所示。
3 实验结果与分析
通过电路设计在示波器上观察其输出结果,如图2~图4所示。

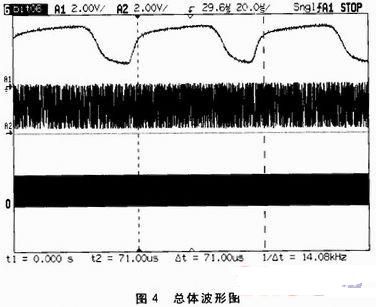
图2为晶振的模拟通道和数字通道的对比图。图3为在频率合成图幅值是之间硅振荡器和晶振的相位对比图。图4为总体波形图,包括频率合成图、硅振荡器输出图和晶振的逻辑分析输出图。
从图3中可以清晰地看出,在范围之内相位差是比较小的,上升沿的转换是可以一致的。而在范围之外相位差就比较大了,上升沿与下降沿相对应,转换会有跳变,不能实现平稳转换。通过平稳转换电路实现的转换跳变不明显,示波器上没有明显的跳变反应。
4 结论
通过实验得出的波形与理论相符,在平稳转换条件下能够实现稳定转换,这为下一步在高加速度条件下实现时钟的精度校准提供了可行依据,也为其他的诸如单片机芯片不同频率下的转换提供了实验依据和简易方法。
- 如何设计选通脉冲串又不会截短脉冲的电路(03-25)
- 利用低抖动LVPECL扇出缓冲器增加时钟源的输出数(12-07)
- 晶振的选择到参数(12-05)
- 小器件大创新 CMEMS可编程振荡器撼动石英晶体振荡器百年“霸业”(10-16)
- 20M低相位噪声晶体振荡器的设计(02-16)
- 用于电路问题诊断的双晶体管热探针(06-04)