基于嵌入式技术的智能仪器触摸屏接口设计
研究开发了嵌入式智能仪器的触摸屏接口; 分析了电阻式触摸屏的工作原理; 设计了触摸屏与微处理器的接口电路; 开发了嵌入式L inux框架下的触摸屏设备驱动程序; 阐述了采用触摸屏作为输入的MiniGU I应用程序的编写方法。
设计的触摸屏接口已成功应用在故障诊断仪器产品上, 增强了仪器的人机交互功能, 方便了现场操作人员使用。
0 引言
在现代化生产中, 为了确保机械设备安全可靠地运行, 通常要采用适宜的仪器仪表, 利用故障诊断技术及时发现故障, 并采取合理的维修或保护措施来排除故障, 预防和避免事故的发生。基于对仪器尺寸、便携性和操作方便性的考虑, 在工业领域如煤炭、钢铁、冶金、电力、化工等行业中大量的仪器仪表和设备, 都逐渐选用触摸屏作为系统的输入设备。
针对这一情况, 作者在开发面向机械故障诊断的智能仪表过程中, 对触摸屏输入接口进行了研究。设计了四线电阻式触摸屏与PXA255 处理器的接口电路, 分析了Linux框架下的字符设备驱动程序设计原理, 完成了触摸屏的接口驱动程序开发, 并设计了用触摸屏作为输入设备的MiniGU I用户程序。触摸屏作为仪器的输入设备, 人机交互直截了当, 大大方便了现场操作人员的使用。
1 硬件结构和工作原理
依据工作原理和传输介质的不同, 触摸屏主要分电阻式、电容式、红外线式以及表面声波式等多种类型。电阻式触摸屏是一块4层透明的复合薄膜屏,如图1所示。下面是玻璃或有机玻璃构成的基层; 上面是一层外表面经过硬化处理从而光滑防刮的塑料层; 中间是两层金属导电层, 在导电层之间有许多细小的透明隔离点把两层隔开。两个金属导电层是触摸屏的工作面, 其两端各涂有一条银胶, 称为触摸屏工作面的一对电极。四线式触摸屏的X 工作面和Y 工作面分别加在两个导电层上, 共有4根引出线, 分别连到触摸屏的X 电极对和Y 电极对上。在触笔触摸屏幕时, 两导电层在接触点处接触。电阻式触摸屏作为输入设备与显示屏配合使用时, 其工作的实质就是通过测量X、Y两个方向电阻的分压, 确定触摸屏的触点坐标, 并将该坐标映射到显示屏坐标上, 从而实现人机交互。由于电阻式触摸屏工作面与外界完全隔离, 受环境影响小, 所以具有不怕灰尘和水汽、稳定性高、不漂移等优点, 特别适合工业现场使用。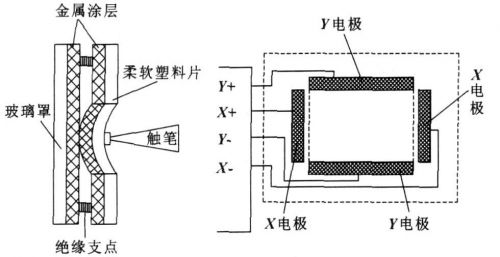
图1 电阻式触摸屏结构
在设计过程中, 选用ADS7843 作为触摸屏接口的AD转换芯片,它具有12 位的转换精度, 最大支持4 096 ×4 096点阵的LCD, 满足仪器设计要求。
仪器系统处理器选用Intel Xscale架构的PXA255处理器,用其GPIO口模拟SPI接口与ads7843进行通信。其接口原理如图2所示。ADS7843完成采集通道的切换和接触点处电压的采集, 其操作时序主要由控制字输入、电压采集和模数转换组成, 详见参考文献。只要在驱动程序中根据时序要求向D IN口发送控制字, 即可从DOUT处得到相应通道的采集结果。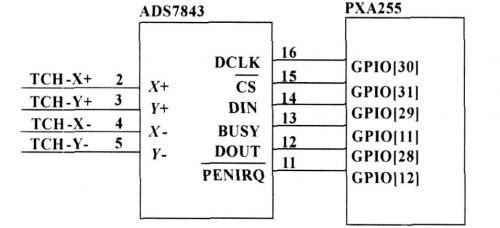
图2 ADS7843与PXA255的接口电路
2 触摸屏接口驱动程序
Linux驱动程序是系统内核的一部分, 它把软件和硬件分离开来, 并向上提供应用程序访问硬件的通信接口, 向下管理保护系统硬件。触摸屏在Linux下被定义为字符设备, 其驱动主要完成触点电压的采集, 并向用户空间传递X 坐标、Y坐标和笔动作(按下、抬起或拖拽) 数据。当触笔按下时, ADS7843的11脚输出低电平, 触发PXA255通用IO口的12脚产生外部中断, 开启定时器, 实现触摸屏的动作。触摸屏的驱动流程如图3所示。
图3 触摸屏驱动程序结构流程
2.1 驱动的编写
触摸屏驱动在Linux框架下属于字符设备驱动。
驱动的入口函数为ads7843 _ ts_ init , 在该函数中,初始化I/O口, 注册笔中断和设备节点, 完成设备文件系统创建标准字符设备的初始化工作[ 8 - 10 ].触摸屏设备操作的结构通过ads7843_ts_fop s定义。
STatic struct file_operatiONs ads7843_ts_fop s = {
read: ads7843_ts_read,
poll: ads7843_ts_poll,
ioctl: ads7843_ts_ioctl,
fasync: ads7843_ts_fasync,
open: ads7843_ts_open,
release: ads7843_ts_release,
};
这样, 只需根据实际需要正确定义该结构中的几个函数过程, 就可完成设备驱动的开发。
当触摸屏设备被打开时, 首先执行到ads7843_ts_open 函数, 并在该函数中, 初始化一个缓冲区, 用于存储坐标数据。在触摸屏被按下后, 系统首先触发中断, 在ads7843_ts_interrup t 中断程序中, 判断in_timehandle全局变量的状态, in_ timehandle在定时器函数中被改变, 也就是说进入中断后, 先经过定时器延时20ms, 完成触摸
- 基于单片机的实用数字信号源与频率计设计(10-16)
- linux电源管理(06-23)
- linux操作系统交叉编译环境的建立方法(09-18)
- 基于Linux-2.6.16的高速模数转换器的应用(01-04)
- 基于Linux的动态电源管理设计(07-12)
- 基于uClinux的实时网络监控服务器开发与应用(10-16)