智能大功率软启动恒流源的设计
式中: Ti为积分时间常数; Td为微分时间常数; Kp为比例系数; Ki为积分常数, Ki=Kp/Ti ; Kd为微分常数,Kd=Kp/Td.
系统启动时间较短, 启动电压、电流较大, 负载所承受的冲击也较大, 致使启动阶段负载的动负荷峰值远远大于正常运行时的负荷, 容易造成负载的损坏。为解决此问题, 设计了一种新型的PID 控制软启动电源系统, 主要由电源、大电流恒流源、输出大电流端采样和控制系统组成, 并完成了实验室内的试验。当电源启动时, 首先由单片机系统给定设定电压、电流或功率。PID软启动是按负载线性上升的规律控制输出。在负载电压线性增加的过程中, 如果电流超出了所限定的范围, 则马上投入电压闭环, 使电流值限定在所设定的范围内后, 再线性逐渐增加电压至额定值, 系统的光强也由零逐渐增大, 完成启动过程。
PID 控制系统软启动效果图如图3 所示。通过串行通信端口com1 通信, 电压单位mV、电流单位mA, 功率单位mW, 时间单位s.
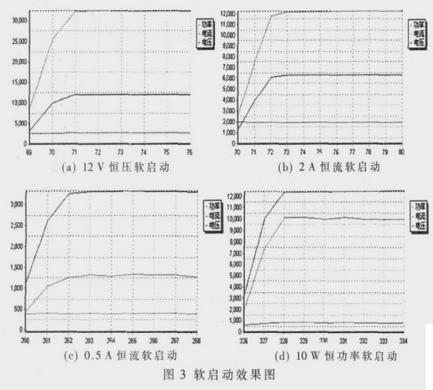
从图3 的软启动效果图可以看出, 在恒定电压、电流、功率的模式下工作时, 系统开机过程超调量很小, 有效地控制了启动过程, 防止了启动过程产生过大的扰动电压, 产生过大的功率,有效地保护了负载。
3 实验结果
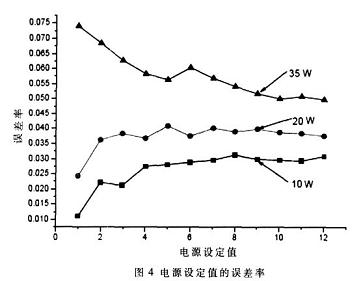
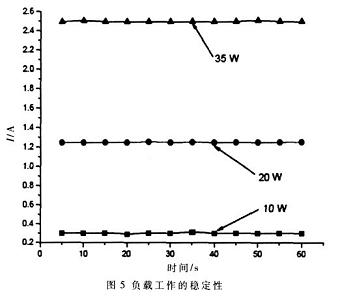
由于输出电流达到8 A, 对电源的功率要求较高, 易产生噪声, 这种随机噪声也会对输出电流产生一定的影响。为减弱这种噪声, 各个模块分别供电, 以减少交叉干扰, 同时在电路板上多加装去耦滤波电容, 减小干扰的影响, 同时OPA549 能有效地抑制纹波。影响电源稳定性的因素很多, 如负载的变化、取样电阻的变化、A/D、D/A 的影响等。如图4 所示, 不同负载的情况下, 电源误差不同。10 W 的负载, 由于功率较低, 在电压、电流增加时, 误差变化也较小。35 W 的负载, 由于功率较大, 工作电流的变化范围比较大, 功耗较大, 电源的误差变化相应地也比较大。如图5, 在10 W、20 W 和35 W 的负载时, 工作状态稳定, 能够满足大电流、大功率的需要。
该系统利用PID 算法进行控制, 采用大功率运放OPA549 输出电流在0~8 A 范围内可调, 最大峰值可达到10 A, 能够有效抑制纹波电流, 克服了传统电流源输出电流范围小的缺点。可设置并能实时显示输出电压、电流、功率实测值, 具有"+ " , "- " 步进调整功能, 输出可在LCD12864 显示, 同时通过RS232 与上位机同步通信, 直接显示, 保存实验数据。通过对测试结果的分析,系统在软启动的过程中, 超调量很小, 启动效果很好, 避免了对负载的冲击。由于大功率调整管的电流大范围变化时, 经过软件补偿、放大电路调整等方法解决线性度较差,实测值和设定值存在偏差的问题。该电源适用于大功率的场合,本电源具有很好的实用性。
- 什么是电子恒流源(01-26)
- 精确测量蓄电池内阻方法的研究(01-06)
- 三线制恒流源驱动电路设计(01-10)
- 单片机的恒流源技术研究(03-14)
- 恒流电路在电源中的应用(01-17)
- 一种高精度数控双极性恒流源电路的设计 (03-25)