基于RD-19230的自整角机接口电路设计
自整角机是一种感应式的微电机,它利用电磁感应原理将机械转角或直线位移精确地转化成电信号。它是自动控制系统中的同步元件,利用两台或多台自整角机在电路上的联系,可以使相隔一定距离、机械上互不连接的两根或多根转轴保持同步旋转或产生相同的转角变化。
自整角机按其使用要求不同,可分为控制式自整角机和力矩式自整角机,按结构形式不同可分为接触式和无接触式两大类。由于自整角机良好的抗震动、冲击和可在油污等恶劣环境下工作的特点,在现代技术领域的各部门中,它被广泛应用于随动系统和远程控制等方面。现代流行的自整角机数字化技术主要有单RC相移法,双RC相移法,实时三角函数发生器方案,利用AD和uP的解决方案,跟踪型解决方案等。由于跟踪型解决方案具有实时性强,抗干扰能力好的特点,现在大部分转化方案都采用此方案。
本文基于应用者的角度介绍了自整角机的基本结构及工作原理,通过分析跟踪型转换芯片RD-19230的功能特点,设计了简单有效的外围接口电路。
1 自整角机原理
自整角机是自动控制系统中传递转角位置信息的微电机,在自整角机和伺服机构组成的随动系统中,与发送轴或主动轴耦合的自整角机称为发送机,与接受轴或被动轴耦合的的自整角机称为接收机。
控制式自整角接收机输出的是与两轴转角差成一定关系的电压,该电压控制交流伺服电动机去带动被动轴旋转,故能带动较大负载。由于接收机工作在变压器状态,故通常称为自整角变压器。力矩式接收机直接输出力矩并带动负载,但带载能力差,只能带动指针、刻度盘等轻负载,常用于角度传输精度要求不很高的指示系统中。图1为自整角机原理图。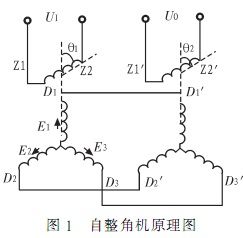
如图1所示,自整角机主要由定子和转子组成,定子和转子问有很小的空气隙,自整角机的激磁磁场,是一个磁场轴线在空间固定于激磁绕组轴线上,磁通密度分布曲线的幅值随时间交变的脉振磁场。当转子绕组偏离中线位置时,转子激磁绕组所产生的脉振磁通必定和定子各相绕组相匝链,因而在定子各相绕组中感应出电势。
本文就是将三路自整角机感应电动势信号处理后,得到RD-19230转换所需的两路正交信号,从而转换为精确的数字信号。
2 RD-19230接口电路设计
2.1 RD-19230功能特性
RD-19230是一种混合信号CMOS的IC,它包含了模拟输入数字输出部分,精确的模拟电路系统与数字逻辑结合在一起形成了一种完整的高性能跟踪型模拟信号转数字变换器。它提供了各种可编程的特性,如分辨率,带宽,速度输出换算等。其主要工作特性和参数如下:1)+5 V单电源供电:2)高达1.3角分的转换精度;3)可编程分辨率,带宽和跟踪速度;4)拥有内部综合基准源;5)可替代转速计的速度输出;6)并行数据输出,输出可编程锁存;7)可编程LVDT模式;8)正常工作在-40~+85℃的温度范围。
RD-19230芯片转化处理的信号为两路正交的含有角度信息的模拟信号,需要±5 V电源供电,内部包含一个电荷泵来为外部提供-5 V电源,其内部通过执行以下三角恒等式,调节数字输出角度与模拟输入角度的差值,跟踪模拟输入角度直至差值为零,则此时数字输出角度等于模拟输入角度。
其中,θ为模拟信号输入角度,φ为数字输出角度。
RD-19230内部有分辨率及跟踪速率控制位,数据锁存控制位,带宽调节位,速度电压输出调节位,工作状态为,机内错误测试端等多种可编程控制位及状态信息位,极大地方便了转化的过程控制。由于其低成本、尺寸小、精度高和多用途的性能,被广泛应用于电动机控制、机床控制、机器人和过程控制等,是现代高性能工业控制系统的理想产品。
2.2 接口电路设计
由于RD-19230芯片内部处理信号为两路正交信号,通常情况下可由旋转变压器直接提供,其正常工作情况下对两路输入信号电压要求为2Vrms±15%,而自整角机输出信号为三线压值不定的信号,从而设计出简单方便的转换电路是有必要的。
由于自整角机中定子绕组为星型连接,彼此在空间上呈120°,并且输出三路定子绕组电压D1、D2、D3是相对于中心点而言,无法对其单独处理。由公式(5)可知,其任意两线间电压为:
由以上公式可知,线线电压之间在空间上相差120°,相对定子绕组输出电压顺时针旋转了30°,电压放大了倍。
三路线线电压在空间上的矢量图如图2所示。由图2可知,三路线线电压中任意两路之差与第三路呈正交关系,若能提取出这样的两路正交信号,就能很好地解决芯片的输入问题。对此作出如下推导: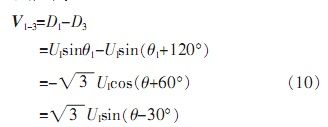
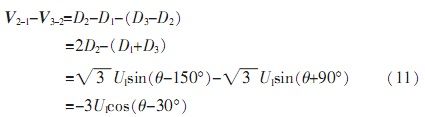
由上式可知,两路正交信号可以通过对三路定子绕组信号进行加法和减法运算得到。从而相应的实现