开环、闭环和“设定后便不需再过问”系统的核心
当选择数模转换器 (DAC) 时,设计师可以从种类繁多的 IC 中选择。DAC 可以针对具体的应用划分成很多不同类别。不过,DAC 的划分也可以简化,仅分成 DC 或低速调节所需的 DAC和产生高速波形所需的 DAC。 本文专注于低速应用所需的 DAC,而无论该应用是低分辨率还是高分辨率、是粗略调节还是精细调节。
就选择低速 DAC 而言,决定设计是闭环、开环或"设定后便不需再过问"的系统是很重要。每一种设计都需要一个具某些关键性能规格的 DAC。
闭环系统
闭环系统包括一条反馈通路,以检测和校准任何误差。传感器根据诸如伺服电动机、流量阀或温度检测单元等的物理参数监视输出。然后传感器将数据馈送回控制器,而控制器则利用这个信息决定是否需要校正。
DAC 和模数转换器 (ADC) 是位于闭环系统核心的关键组件。DAC 用在前馈通路中以调节系统,ADC 用在反馈通路中,以监视这些调节的效果。它们一起施加和检测模拟控制信号,以真实地调节它们控制的参数。
电动机控制是这类闭环系统的一个例子,如图 1 中详细说明的那样。首先,将一个想要的输出 (设定点) 加到控制器上,控制器对这个输出和反馈信号进行比较。如果需要校正,那么控制器会调节 DAC 的输入编码,然后 DAC 在其输出端产生一个模拟电压。该 DAC 的输出电压通过一个功率放大器放大,以给电动机提供所需的驱动电流。
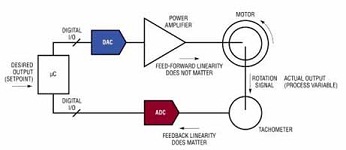
图 1:闭环系统举例

在这个闭环系统的下一级,用一个转速计测量电动机的旋转速度。旋转信号是该闭环系统的实际输出或可变过程。ADC 将该转速计的输出数字化,并将数据发送到控制器,在控制器中,由算法决定是否需要在 DAC 输出以及最终的电动机上进行任何校正。采用这种方式,误差被降到可接受的水平。理想情况下,反馈允许闭环系统消除所有误差,从而有效地限制噪声、温度、外力或其他不想要的信号等任何误差来源的影响。
闭环系统的性能取决于准确的反馈通路,包括传感器和 ADC。本质上,反馈通路补偿了前馈通路的误差。因为 DAC 在前馈通路中,其积分非线性 (INL) 误差就自动得到了补偿。INL 误差是 DAC 输出端实际的传递函数与理想传递函数之间的偏差。不过,DAC 必须有良好的差分非线性 (DNL),并且必须相对于数据表中规定的位数呈单调性。DNL 误差是 DAC 模拟输出端的实际电压变化与理想电压步进 (等于 DAC 输入编码中 1 个最低有效位 (LSB) 步进) 之差。单调的 DAC 意味着,模拟输出始终随着数字编码的提高而提高或保持与其相同 (反之亦然)。始终大于 -1LSB 的 DNL 规格意味着单调性。图 2 显示 DAC 模拟输出电压相对于 DAC 输入编码的传递函数。
如果 DAC 不是单调的,那么会存在一个负反馈变成正反馈的区域。这可能导致振荡,而振荡最终可能毁坏电动机。
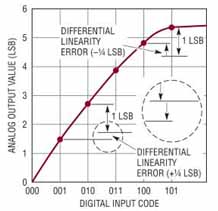
图 2:DNL 传递函数
![]()
开环系统
开环系统没有反馈通路。这意味着,系统自身必须是准确的。开环控制对于良好定义的系统是有用的,在这类系统中,输入编码及其在负载上所导致行动之间的关系是已知的。如果负载不是非常可预测的,那么最好使用闭环控制。
开环系统的一个例子如图3所示。在这个例子中,DAC 驱动凌力尔特稳压器 LT3080 的 SET 电压引脚。SET 引脚是误差放大器的输入和输出电压的调节设定点。LT3080 的输出电压范围为 0V 至绝对最大额定输出电压。
DAC 的分辨率决定 SET 引脚调节的步进大小。例如,一个具有 5V 基准的 8 位 DAC 有 5V / 28 = 19.5mV 的 LSB。一个具有同样 5V 基准的 12 位 DAC 有 1.2mV 的 LSB,一个 16 位 DAC 有 76µV 的 LSB。这意味着,就一个理想 DAC 而言,数字编码每增大一次,模拟输出都应该增加 76µV。
开环系统中的其他重要参数包括偏移、增益误差、基准电压误差以及这些参数随时间和温度变化的稳定性。INL 尤其重要,因为与闭环系统相比,DAC 的 INL 对系统的总体线性度有直接影响。
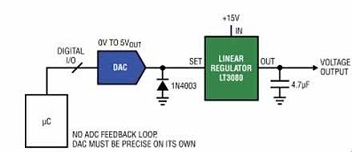
图 3:开环系统举例

"设定后便不需再过问"的系统
DAC 线性度起到重要作用的第三种应用是"设定后便不需再过问"的系统。在这类系统中,调节或校准只进行一次,也许在制造时或安装时。因此,这类系统一开始是一 种闭环系统,然后又变成开环的。所以,与初始准确度 (偏移、增益误差、INL) 有关的任何参数都不关键,因为这些参数在调节时都得到了补偿。但是一旦反馈去掉,稳定性就变得很关键了。表明稳定性的数据表性能规格包括:增益误差漂移、 失调和基准漂移。
图 4 显示一个"设定后便不需再过问"的应用例子。在这张图中,一个较低分辨率的 DAC 驱动一个可编程增益放大器,该放大器设定精准
- RS-232至RS-485RS-422接口的智能转换器(01-24)
- 同步降压转换器电路设计基础(01-01)
- 真有效值AC/DC转换器AD736及其在RMS仪表电路中的应用(02-16)
- 满足FPGA电源设计需求的DC/DC转换器(02-15)
- 开关DC-DC转换器的EMI方案(04-29)
- 多媒体手机的电源管理方案(04-26)