基于WiFi和RFID定位技术的电子标签定位算法
图如图2所示。
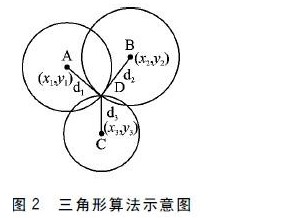
设位置节点D(x,y),已知A、B、C三点的坐标为(x1,y1),(x2,y2),(x3,y3)。它们到D的距离分别是d1、d2、d3.则D的位置可以通过下列方程中的任意两个进行求解。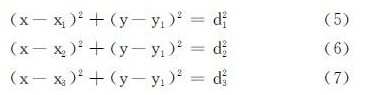
但是在实际应用中,由于测量误差的存在,三个圆交于一点的情况很难存在。而这是经常的事情,这会导致方程无解,无法定位出待测目标的位置。
2.3本文采用的算法
本方案中,我们采用的定位算法是基于接收信号强度的算法(即LANDMARC算法),并在LANDMARC算法的后面利用三边定位算法,使其更准确。
实验前在某公司大楼的走道和三间房内各安置每隔3 m固定一个电子标签(参考标签),在该层楼的东南两北角各放置一个AP.做好上位机与下位机的无线通信(软件程序的服务器和客户端的连接)。
实验进行时,当待测标签进入到AP(4个)的范围内,开始接收到待测标签发出的信号场强,并传入上位机。同时也接收各个参考标签在各个AP的信号场强,并传入上位机。
定位算法则把待测标签在4个AP(AP1,AP2,AP3,AP4)上的场强建立成一个场强矢量,同时参考标签也建立成场强矢量。通过LANDMARC算法即通过比较待测标签场强矢量与参考标签场强矢量的欧氏距离,找出3个欧氏距离最小的参考标签,并得知3个参考标签的具体位置(在实验前期,参考标签放置时已经有记录)。对于3个参考点,不用再根据信号的强度来决定其半径,而是3个以参考点为圆心,以最近参考标签之间的距离(以确定每隔几米放置一个参考标签)的3/4长度为半径做3个圆,这样3个圆两两相交的可能性会增加。
由于3个圆很难在同一个点相交,所以对于3个圆之间的关系有3种:◆3个圆两两相交,并且3个圆有公共区域;◆3个网两两相交,但没有公共区域;◆3个圆不相交。
具体关系如下:
①当3个圆有公共区域时,则公共区域必然有3个交点,以3个交点作三角形,则待测标签的坐标即是三角形内心坐标。
②当两两相交无公共区域时,必然有两两公共区域。取两圆相交区域的两个交点的连线的中点,然后以这3个中点做三角形,其内心就是待测标签内心坐标。
③3个圆不相交时舍弃,接受下一组最近3个参考标签,若3次还没有找到相交情况,即用3个参考标签做的位置做三角形,其内心就是待测标签的位置。
本算法的优势为在原来LANDMARC算法的定位精度上,再进行三角定位,进一步提高定位精度。同时,以参考标签之间的距离来进行进一步的三角定位,可以减少额外的计算,并且可以减少由于参考标签场强的变化带来的重复测量。
结语
本文主要讨论了基于信号强度算法和基于非测距的三边算法,同时对LANDMARC算法进行了进一步的改进。由相关实验结果得出:该算法可以达到定位精度在1.5 m左右的误差,该方案适合广泛运用。
- RFID定位方案中的Wi-Fi运用(05-02)
- RFID在开架书库管理中的应用研究(01-13)
- 一种微波频段有源RFID系统设计(08-23)
- RFID技术分类研究(09-23)
- RFID简介和发展(12-18)
- RFID的分类(01-10)