全数字DC-DC变换器研究
时间:01-24
来源:21IC
点击:
 |
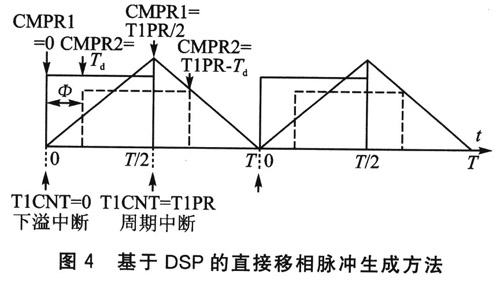
3.1 基于DSP的直接移相脉冲生成方法
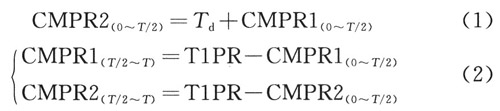
移相是滞后臂驱动相对于超前臂驱动之间的一个周期性延时,其延时角即为移相角。设PWM1/PWM2驱动超前臂开关管,PWM3/PWM4驱动滞后臂开关管,每个桥臂上下两管之间的驱动互补且带死区。在实现中可以固定超前臂的驱动在每一周期的T0时刻发出,那么只要延迟移相角φ对应的时间再发生全比较事件则可以得到滞后臂的驱动,可以实现O°~180°范围内的自由移相。由图4可见,定时器T1的计数方式为连续增减模式,在计数器T1CNT=0和 T1CNT=T1PR时分别更新CMPR1和CMPR2的值,这一过程可以分别在T1的下溢中断和周期中断中完成。设移相角φ对应的延迟时间为Td,显然在0~T/2、T/2~T时间段内,CMPR1、CMPR2值的关系可分别表示如下:
 |
 |
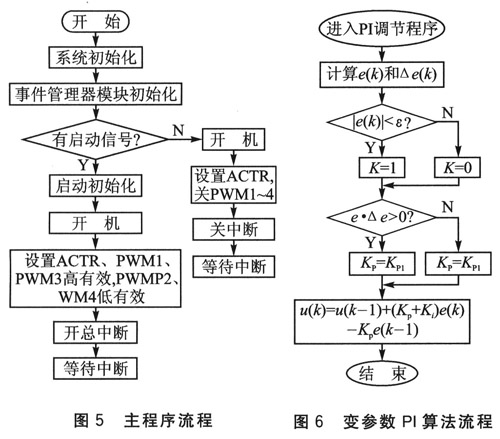 |
Kp2,其程序流程如图6所示。
4 实验结果
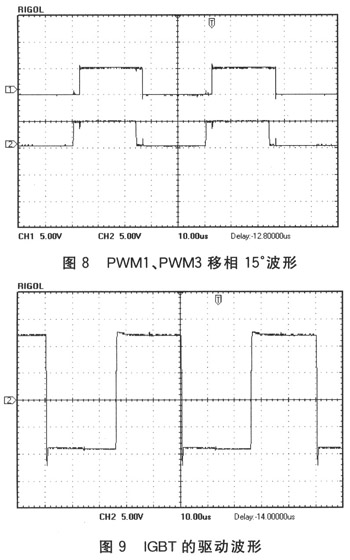
根据前述方案搭建了实验系统,实验中采用三菱公司的智能功率模块(IPM)PM200DSA120作为逆变器的主开关器件。它抗干扰能力强、开关速度较快,功耗较低,具有驱动电源欠压保护、桥臂对管互锁保护、过流保护以及过热保护等功能。开关频率为fs=10 kHz,开通时间为ton。=1.4μs,关断时间为toff=2.Oμs。实验波形如图7至图9所示。图7为PWM1、PWM2的互补波形,由图可知,它们之间存在死区,该死区是可编程的,可根据实际情况来确定。图8为PWM1、PWM3之间的移相15°的波形,该移相角可通过程序来控制,根据给定及负载的大小进行自动调节。图9为T1管的驱动波形,正电压大约为15 V,负电压大约为9 V。
 |
本文研究的是移相全桥全数字ZVS DC/DC变换器,具体分析了它的工作原理,给出了其数字实现方案,并进行了实验。实验结果说明了方案的可行性。基于DSP的移相全桥全数字ZVS DC/DC变换器结构简单,工作可靠,易于实现,调试方便,功能完善,动静态性能与模拟变换器一样好,有很好的应用前景。
发布者:博子
- 以数字方式管理电源的简便方法(11-30)
- 热插拨和数字电源监控常见问答(01-18)
- PMBus——数字电源开放标准协议(01-18)
- 智能化数字电源系统的优化设计(02-12)
- 基于FPGA的高精度数字电源(02-12)
- 数字电源控制指南(06-26)