电力有源补偿及滞环电流跟踪控制研究
时间:11-24
来源:EDN
点击:
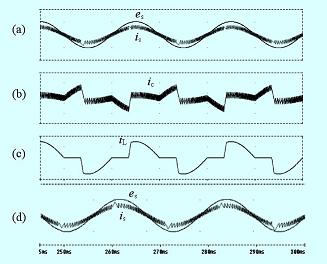
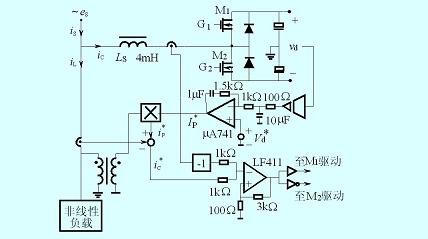 图1 有源无功与谐波补偿器系统仿真电路模型 整个系统的工作过程如下,直流电压反馈信号vd与其给定值v*d的比较误差信号,经pi调节器获得电源有功电流的幅度给定i*p,它与es的检测信号相乘得瞬时有功参考电流i*p。电压互感器保证了i*p与es同频同相。经式(5)的减法运算产生所要求的无功补偿电流给定信号i*c,最终通过带有回环继电器特性的非线性控制器来达到对被控对象的变结构控制及开关驱动,使补偿器主电路按照给定的控制规律i*c进行结构变换,实现补偿电流ic对i*c的电流跟踪。直流电压控制单元的自动调节作用,保证了系统稳态下,i*p大小恰好符合电源输出功率与负载功率相平衡的要求(忽略补偿器本身的器件损耗),而且无需实时检测与计算负载的无功电流成分,同时直流侧电压vd基本恒定。 4 系统仿真研究 图1所示为有源无功与谐波补偿双闭环控制系统,所涉及的pi调节器、乘法器等都属于常规控制环节,有关控制参数选择,不少文献都有详细介绍。至于非线性控制器的设计,基于上述变结构电流跟踪控制思想,运用电子技术手段设计一种带有回环继电器特性的运算比较器是不困难的。这里需要指出的是,经验告诉人们,众多的参数设计方法只能为所要实现的系统提供指导和参考,具体实施的系统参数尚需通过实验予以调整和确定。pspice仿真软件包为笔者的电路参数实验选择与调整提供了重要的手段,尤其是对于电力电子系统设计而言,运用软件包十分丰富而灵活的分析方法、人机界面和元器件库,几乎可以仿真任何参数变化和寄生参数对系统波形及响应特性的影响,大量减少完成强电系统实验调试所花费的时间与投资。由于篇幅所限,本文仅着重就变流器交流侧电抗器的参数改变对系统性能的影响进行pspice电路仿真研究,旨在表明该仿真方法及所提出的有源补偿系统的有效性。 对于变结构电流跟踪控制的有源滤波补偿器,其交流侧滤波电抗器的最小值主要由开关造成的谐波要求来决定,滤波电抗应把这一谐波电流限定在指定范围内。另一方面,在给定直流侧电压的情况下,有源补偿器输出电流跟随指令变化的速度决定了电抗器的最大值。如果选择的电抗器参数偏低,则有源补偿器输出电流开关谐波的脉动幅度将会增大;若此参数偏高,则由于电流惯性过大而不能保证有源补偿器输出电流具有较快的跟随特性,使得补偿效果变差。在实际调试当中应予以折衷考虑。本系统根据常规的设计方法初选参数,又经过pspice电路仿真调整,最后选定的参数如图1中所示,其仿真主要波形示于图2。由图2(a)可见,经补偿后的电源电流波形很接近正弦波,且与电源电压同相位,功率因数近似为1;图2(c)表明了非线性负载电流波形;电流控制环节中的补偿电流指令信号及其变结构控制下的电流跟踪波形示于图2(b),可见在补偿电流指令变化较快时,电流跟随性能比较理想。图2(d)所示是起初滤波电抗取值较大( ,其他参数不变)对电流波形的影响。可见滤波电抗参数的减小,使电流跟随特性进而使电源电流波形有了明显的改善。
|
- 电力电缆布线热伸缩及其对策浅谈(07-28)
- 电力电缆故障测量中接地电流消除方法的研究(11-24)
- 打开通往未来智能电网之路(02-28)
- 基于DSP单周控制有源电力滤波器的研究(06-01)
- 高频开关电源的特点及在电力系统的应用(06-09)
- 电力机车辅助电源系统的分析与比较(10-28)