智能采光实时追日的电能管理系统
时间:08-05
来源:21IC
点击:
引 言
太阳能是资源丰富、无污染的能源替代品,怎样提高对其的利用率逐渐成为各国的研究焦点。太阳能的利用存在以下问题:首先,太阳能虽然资源丰富,但能量分散,集中在某点的能量较少,同时太阳能的方向性决定了较长时间内不可能在固定方向一直获取较大的能量;第二,太阳能受环境条件的制约,只有在白天太阳光线较好的情况下,才能获得稳定的太阳能;第三,太阳能电池板的转换效率不高,目前世界上太阳能电池板的转换效率最高也只有30%,而国内使用的转换效率大都在20%左右。本课题主要针对太阳能利用率低这一问题,利用太阳定位算法以及光敏电阻传感器反馈法,并通过 Fusion系列单片机模数混合的FPGA协调控制电机,驱动太阳能电池板实时追日,以提高太阳能的利用率。后续通过FPGA的PWM模块对蓄电池进行智能充电和电源管理,最后在开发板的LCD单元中显示天气和电源状态信息,并同时通过串口及时反馈相关信息到PC机上。
1 系统设计
1.1 系统整体设计
本系统主要由中央处理单元、智能采光、电源管理和上位机软件4个部分组成。系统主要实现了太阳能利用率的提高,太阳能的转换和存储,UPS功能。本设计还提供了对系统的检测和管理。
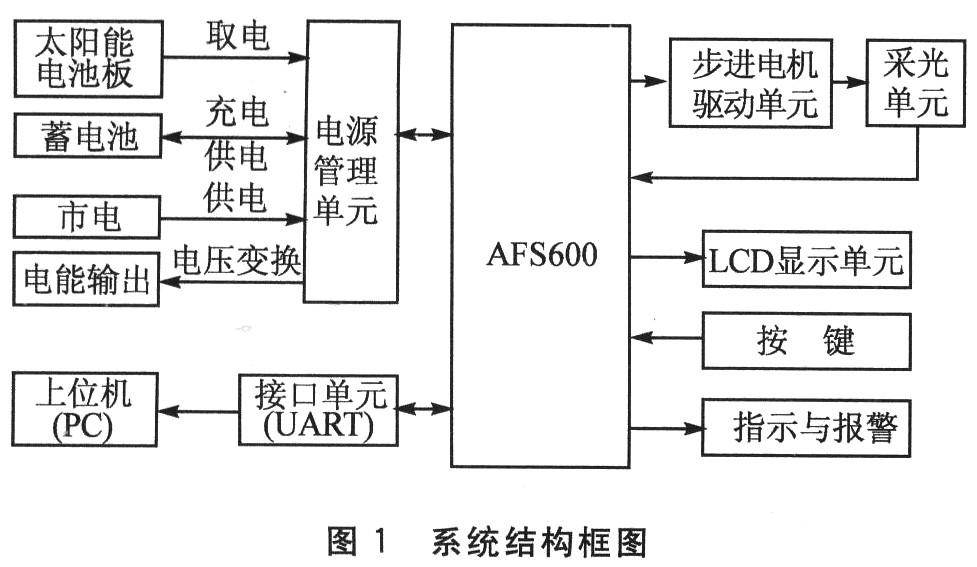
如图1所示,系统包括控制处理单元、电源管理单元、供电和输电单元(包括太阳能电池板、蓄电池、市电、电能输出接口)、接口单元、LCD显示单元、按键、指示和报警单元、步进电机驱动单元和采光单元。利用FPGAAFS600作为控制处理单元,主要通过Verilog HDL硬件逻辑和cote51软核实现数据采集、处理、电机的驱动控制以及电源管理单元的控制。采光单元和步进电机驱动单元主要实现采集光强数据以及控制机械传动改变太阳能电池板的方位的功能。电源管理单元与供电和输电单元实现蓄电池充/供电切换、市电供电和蓄电池供电切换、太阳能充/供电切换、电能变换输出。
1.2 智能采光的设计
系统提供两种方式对太阳方位进行跟踪:光敏电阻阵列自适应控制算法和定位跟踪算法。其中以光敏电阻阵列自适应控制算法为核心,以定位跟踪算法为辅助校正。这两种方式有机结合,以增强系统的鲁棒性和抗干扰性,使其能更好地适合各种环境。
1.2.1 光敏电阻阵列
光敏电阻是电阻性传感器,在所受到的光强度发生变化时,其电阻值相应变化,可将光信号转换为电信号。
(1)阵列布局设计
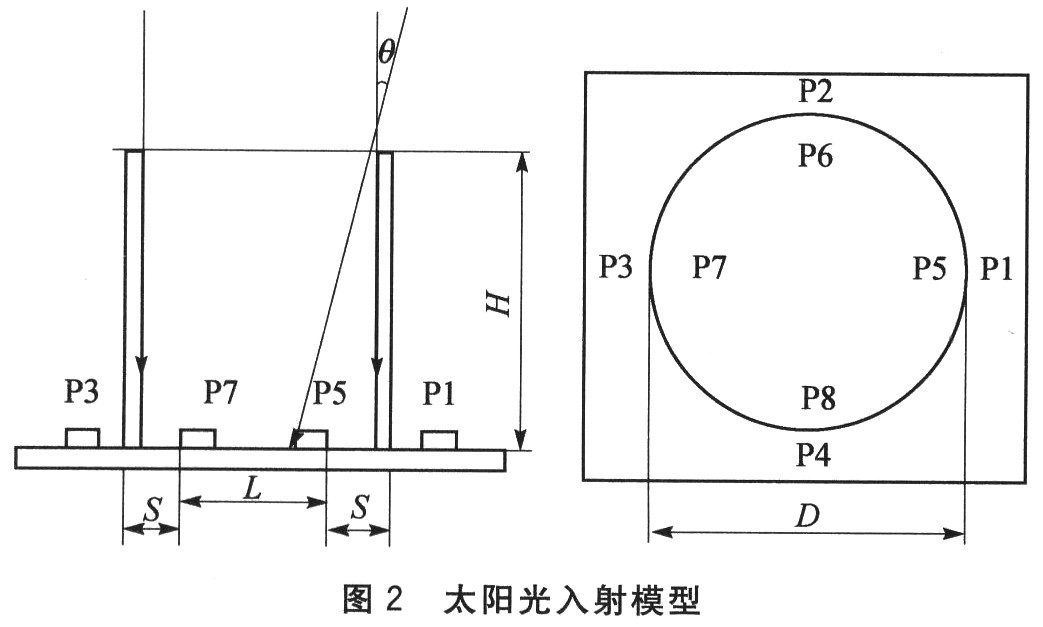
如图2右侧所示,P1~P8为光敏电阻,分别布置在圆筒内外东、南、西、北四个方位。P1~P4裸露在外,东西对称的一对(P1,P3)用于粗略检测太阳方位角θA;另一对(P2,P4)用于粗略检测太阳入射角θZ;P5~P8在圆筒内部,东西对称的(P5,P7)用于精确检测太阳方位角θA;另一对 (P6,P8)用于精确检测太阳入射角θZ。采光板设置了一个保护圆筒,它可以较大程度屏蔽外界环境的散射光及其他干扰光线,使得外界的干扰光源对跟踪效果的影响降到较低,提高跟踪精度。
布置在外部的4个光敏电阻P1~P4能反映出当前天气情况,例如阴天、晴天或者黑夜,从而可以决定是否需要调整太阳能电池板;布置在内部的4个光敏电阻P5~P8用于精细调整电池板的方位。
当太阳光偏离垂直方向一个较小的角度时,由于受环境散射光的影响,外部光敏电阻不会反映出太阳光线的变化;而内部光敏电阻受到了圆筒对环境散射光的屏蔽保护,它们接收的照度会出现差值,即偏离信号。当太阳光偏离了一个较大的角度时(阴雨天,乌云过后或者日夜交替),筒内的光敏电阻可能接收不到太阳光,筒外的光敏电阻就能反映出照度差值。控制单元通过对信号再进行判断和处理,控制太阳光接收装置角度的调整,直到太阳能电池板对准太阳。详细的自适应跟踪流程见 2.2节。
(3)设计参数的选取
粗略认为太阳在24 h内转过360°,本系统设计指标为每半小时跟踪1次,所以跟踪的灵敏度为7.5°,即当太阳角度偏转7.5°(θ=7.5°)的时候,光敏电阻P5被遮挡,而P7能被光线照射。此时采光板就要进行调整,以跟踪太阳的方位。
根据实物的布局要求,设定圆桶的直径D=5 cm,S=O.5 cm。因此,得到内部传感器之间距离为L=(5-2×O.5)=4 cm。上述的参数选定以后,根据H=S/tan(θ),即H=S/tan(2 7c×7.5/360),把S=O.5 cm代入,最后得到H=3.79 cm。实际中考虑到光线的散射和干扰,选取圆桶高度为6 cm。
1.2.2 定位跟踪算法
因为地球自转一周为24小时,可以粗略认为太阳每小时自东向西偏移15°(360°/24),设时角为ω,磁偏角(赤纬角)为э,太阳入射角(天顶角)为θZ,太阳方位角为θA,φ为当地纬度。经计算得到:
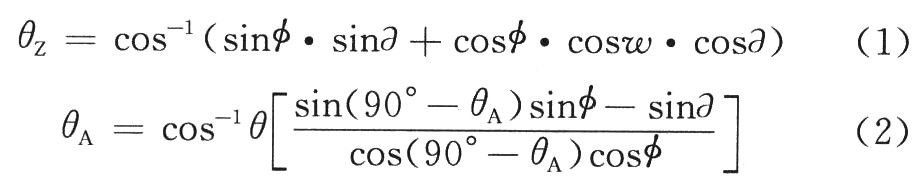
根据公式(1)、(2),考虑到南京经度为e118.77,纬度为n32.O,海拔为50 m以下,再参考大数估计算法和相关的校正参数,在Matlab中编程计算出太阳方位角和高度角。由于此计算复杂庞大,会大量消耗FPGA的资源,不利于在 FPGA的51软核下运行。考虑到本系统只针对南京地区,地形上忽略海拔和纬度的变化,时间上忽略时区和分钟的变化,在Keil C中重新精简程序,并把前后算法所得数据以及实际测量数据进行对比描绘曲线,如图3所示。
太阳能是资源丰富、无污染的能源替代品,怎样提高对其的利用率逐渐成为各国的研究焦点。太阳能的利用存在以下问题:首先,太阳能虽然资源丰富,但能量分散,集中在某点的能量较少,同时太阳能的方向性决定了较长时间内不可能在固定方向一直获取较大的能量;第二,太阳能受环境条件的制约,只有在白天太阳光线较好的情况下,才能获得稳定的太阳能;第三,太阳能电池板的转换效率不高,目前世界上太阳能电池板的转换效率最高也只有30%,而国内使用的转换效率大都在20%左右。本课题主要针对太阳能利用率低这一问题,利用太阳定位算法以及光敏电阻传感器反馈法,并通过 Fusion系列单片机模数混合的FPGA协调控制电机,驱动太阳能电池板实时追日,以提高太阳能的利用率。后续通过FPGA的PWM模块对蓄电池进行智能充电和电源管理,最后在开发板的LCD单元中显示天气和电源状态信息,并同时通过串口及时反馈相关信息到PC机上。
1 系统设计
1.1 系统整体设计
本系统主要由中央处理单元、智能采光、电源管理和上位机软件4个部分组成。系统主要实现了太阳能利用率的提高,太阳能的转换和存储,UPS功能。本设计还提供了对系统的检测和管理。
如图1所示,系统包括控制处理单元、电源管理单元、供电和输电单元(包括太阳能电池板、蓄电池、市电、电能输出接口)、接口单元、LCD显示单元、按键、指示和报警单元、步进电机驱动单元和采光单元。利用FPGAAFS600作为控制处理单元,主要通过Verilog HDL硬件逻辑和cote51软核实现数据采集、处理、电机的驱动控制以及电源管理单元的控制。采光单元和步进电机驱动单元主要实现采集光强数据以及控制机械传动改变太阳能电池板的方位的功能。电源管理单元与供电和输电单元实现蓄电池充/供电切换、市电供电和蓄电池供电切换、太阳能充/供电切换、电能变换输出。
1.2 智能采光的设计
系统提供两种方式对太阳方位进行跟踪:光敏电阻阵列自适应控制算法和定位跟踪算法。其中以光敏电阻阵列自适应控制算法为核心,以定位跟踪算法为辅助校正。这两种方式有机结合,以增强系统的鲁棒性和抗干扰性,使其能更好地适合各种环境。
1.2.1 光敏电阻阵列
光敏电阻是电阻性传感器,在所受到的光强度发生变化时,其电阻值相应变化,可将光信号转换为电信号。
(1)阵列布局设计
如图2右侧所示,P1~P8为光敏电阻,分别布置在圆筒内外东、南、西、北四个方位。P1~P4裸露在外,东西对称的一对(P1,P3)用于粗略检测太阳方位角θA;另一对(P2,P4)用于粗略检测太阳入射角θZ;P5~P8在圆筒内部,东西对称的(P5,P7)用于精确检测太阳方位角θA;另一对 (P6,P8)用于精确检测太阳入射角θZ。采光板设置了一个保护圆筒,它可以较大程度屏蔽外界环境的散射光及其他干扰光线,使得外界的干扰光源对跟踪效果的影响降到较低,提高跟踪精度。
布置在外部的4个光敏电阻P1~P4能反映出当前天气情况,例如阴天、晴天或者黑夜,从而可以决定是否需要调整太阳能电池板;布置在内部的4个光敏电阻P5~P8用于精细调整电池板的方位。
当太阳光偏离垂直方向一个较小的角度时,由于受环境散射光的影响,外部光敏电阻不会反映出太阳光线的变化;而内部光敏电阻受到了圆筒对环境散射光的屏蔽保护,它们接收的照度会出现差值,即偏离信号。当太阳光偏离了一个较大的角度时(阴雨天,乌云过后或者日夜交替),筒内的光敏电阻可能接收不到太阳光,筒外的光敏电阻就能反映出照度差值。控制单元通过对信号再进行判断和处理,控制太阳光接收装置角度的调整,直到太阳能电池板对准太阳。详细的自适应跟踪流程见 2.2节。
(3)设计参数的选取
粗略认为太阳在24 h内转过360°,本系统设计指标为每半小时跟踪1次,所以跟踪的灵敏度为7.5°,即当太阳角度偏转7.5°(θ=7.5°)的时候,光敏电阻P5被遮挡,而P7能被光线照射。此时采光板就要进行调整,以跟踪太阳的方位。
根据实物的布局要求,设定圆桶的直径D=5 cm,S=O.5 cm。因此,得到内部传感器之间距离为L=(5-2×O.5)=4 cm。上述的参数选定以后,根据H=S/tan(θ),即H=S/tan(2 7c×7.5/360),把S=O.5 cm代入,最后得到H=3.79 cm。实际中考虑到光线的散射和干扰,选取圆桶高度为6 cm。
1.2.2 定位跟踪算法
因为地球自转一周为24小时,可以粗略认为太阳每小时自东向西偏移15°(360°/24),设时角为ω,磁偏角(赤纬角)为э,太阳入射角(天顶角)为θZ,太阳方位角为θA,φ为当地纬度。经计算得到:
根据公式(1)、(2),考虑到南京经度为e118.77,纬度为n32.O,海拔为50 m以下,再参考大数估计算法和相关的校正参数,在Matlab中编程计算出太阳方位角和高度角。由于此计算复杂庞大,会大量消耗FPGA的资源,不利于在 FPGA的51软核下运行。考虑到本系统只针对南京地区,地形上忽略海拔和纬度的变化,时间上忽略时区和分钟的变化,在Keil C中重新精简程序,并把前后算法所得数据以及实际测量数据进行对比描绘曲线,如图3所示。
- 为太阳能灯供电的低损耗电路的设计(01-22)
- 什么是光伏效应?(01-19)
- 21世纪的绿色能源—太阳电池(01-06)
- 利用太阳能电池进行在线涓流充电的电路(01-09)
- 锂电池充电器设计技巧:从太阳能电池获取更大功率(02-19)
- 基于MPPT的智能太阳能充电系统研究(03-21)