 MCP2551引脚图如图3所示。
MCP2551引脚图如图3所示。
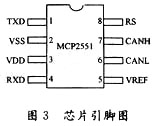
为了增强CAN总线节点的抗干扰能力,MCP2551与DSP 2407A的CAN控制器之间加一个光耦隔离6N137,这样可以很好地实现CAN总线节点间的电气隔离。
3.2 软件设计
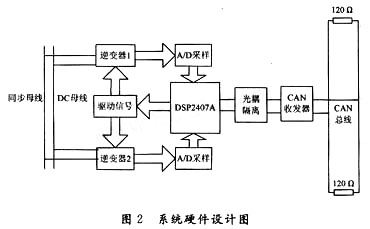
CAN节点通信的功能是将本节点的数据信息通过CAN总线以广播形式传给网络上的其他节点,并且接受其他节点传来的信息。因此软件的设计可以分为3部分:系统的初始化、信息的定时发送和中断接收。主程序在完成初始化后打开中断,在TMS32LF2407A的数据采集中断服务中对模块的输出电流进行采样,在一个工频周期结束后,计算逆变器的输出电流值和对各模块进行编号,通过定时发送程序,每隔2 ms就向CAN总线上发送1次,按照既定的均流算法,进入下个循环周期。在中断接收程序中,存储数据到接收缓冲区,供主程序使用。
4 仿真实验结果
在Matlab 6.5软件平台上对上述方案进行仿真。仿真参数如下:输入电压为DC48 V,输入电流为14 A(220 VDC,3 kVA),单台输出电流为14 A,输出频率为50 Hz。逆变器采用电压电流双闭环控制,L=2.7 mH,C=4.5 μF,并机数量为2台。其中电流环采用P调节,电压环采用P1调节,设定P=5。仿真算法采用变步长的ode23tb,仿真时间为0.05 s,采样时间为0.002 s。仿真结果如图4、图5所示。
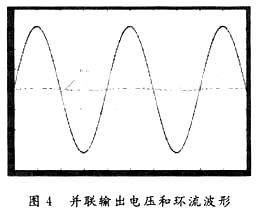
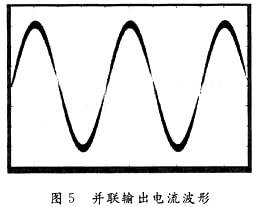
由图4可看出,将CAN现场总线引入本系统中,可达到较好的均流效果。在图5中,当实现并机时,两台逆变器输出电流分别为6.8 A,6.9 A,可以很好地实现分担负载的任务。
5 结 语
本文将现场CAN总线引用到并联逆变电源系统中,较好地解决了并联逆变电源普遍存在的环流问题,提高了系统的稳定性和抗干扰性。同时真正实现(N+X)并联冗余,可以在不断开负载的情况下通过热插拔增加或减少并机模块,利用CAN总线的特点,使得整个系统不受影响。
Top
|