一体化直驱电机驱动器的设计及实现
时间:06-26
来源:电子工程专辑 作者: 周开勇
点击:
 F2: IPM采用高电平驱动接口,内置了下拉电阻 | |
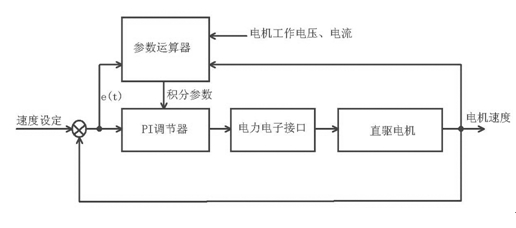
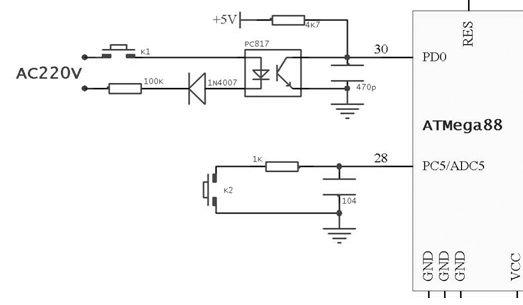 F3: 微控制器的PD0端口上设有4.7kΩ的上拉电阻 软件设计 智能PI速度控制 一体化直驱电机通过霍尔传感器获得定子驱动的换相信号,对换相信号的时间间隔进行测量和数字滤波,可以得到电机的平均速度。与直流有刷电动机一样,调节电动机定子的平均电压就可以调节电动机的速度。 直接驱动电机的速度调节范围被设计为每分钟10~200转,在传动设备的应用中,对动态特性的要求并不高,速度的控制采用了PI控制算法。为了更好地对电机的速度进行控制,系统将会根据电机的运行状态,运用不同控制算法。 1)积分调节PI控制 当电机处于启动加速、减速停止或正/反转切换阶段时,系统的速度控制偏差e(t)将会很大,容易造成PI运算的积分积累过快,从而引起速度的超调和振荡。因此有必要根据速度的控制偏差和不同的负载状态改变PI调节器的积分参数; 2)积分遇限削弱PI控制 任何时候控制器还会根据上一次的PI调节器的输出来决定当前的PI调节器的积分动作。当上一次的PI调节器输出已经正向饱和时,则只有负的速度控制偏差会被积分;反之,只有正的速度控制偏差会被积分。 这两种控制算法的应用都是根据电机的运行状态进行的,一个由运行状态和速度控制偏差共同决定的PI控制算法的积分参数运算模块被应用在PI调节器中,速度的PI调节器将更智能化,调节器结构如图4所示。
|
交流电动机 机械减速机构 ATmega88 M4A5 相关文章:
- 简论变频器广泛应用对电力系统的影响(06-21)