车载导航定位技术与测试方法
锁,定位中断后重新恢复定位的速度。失锁重捕时间短的接收机在易中断环境中(如隧道等)的定位性能好,因此失锁重捕时间可以有效评估车载终端的性能。
(4)跟踪灵敏度
是指被测设备在捕获信号后,能够保持稳定输出并符合定位精度要求的最小信号功率。评估的是接收机在已经定位的状态下,维持定位精度要求所需的最低接收功率。跟踪灵敏度是评估车载终端性能的关键指标之一。
(5)捕获灵敏度
是指接收机在失锁状态下,在规定时间内输出满足定位指标要求的最低接收信号功率。捕获灵敏度高的接收机有更强的捕获弱信号的能力,因此也是评估车载终端性能的重要指标之一。
用户提出性能指标主要是从体验的角度出发的,因此对不同的应用场景,用户最关注的指标不同。在常规驾驶车辆场景下,定位精度和捕获灵敏度对用户体验影响最大,而在紧急情况下触发定位报警时最关键的指标则是定位精度和跟踪灵敏度。所以,对于终端的导航定位性能测试,很多时候是针对终端使用场景定制测试项目。
从卫星信号的产生方式来划分,导航定位性能测试方法可以分为以下3类:
● 实验室测试,用卫星信号源模拟真实的卫星信号,这种测试方式场景可重现,应用较广泛。
● 实场测试,即利用天上真实的卫星信号进行测试,这种测试方式更贴近用户的真实体验,对车载终端的性能评估也很关键,但由于卫星信号受天气等各种因素影响,场景不可重现,且时间、经济成本较高,具有一定的局限性。
● 虚拟路测,通过卫星信号采集回放仪将卫星信号录制下来,在实验室中回放信号进行测试,这种方法兼具实验室测试和实场测试的优点;在这种方式中,如何保障卫星信号采集的完整性和回放的准确性是最大的挑战。
以上3种方式各有优劣,总体来说,虚拟路测是未来的发展趋势,带信道模拟的导航定位虚拟路测也已经开始研究。
从测试评估方式来划分,导航定位性能测试方法可以分为以下3类:
● 一定场景下的性能一致性测试,例如3GPP的A-GNSS测试都属于此类,测试终端在一定场景下(如在理想信号、多径环境、移动场景下等)能否满足要求,该测试只能得到终端通过还是不通过的结果,不能直接通过测试结果来评估终端之间的差异。
● 极限值测试,CTIA的空间射频接收机性能测试、国内检测机构(如定位总站)GNSS定位性能测试等都属于此类。这种方式会获得一个准确的数值,如定位精度是几米、捕获灵敏度是多少dBm等,这种方式的优势是能很直观地得到终端的性能,比较不同终端的性能差异;缺点是多次测试结果的一致性相对于第一类方法略差。
● 余量测试,介于以上两者之间的一种测试方式,基于3GPP定义的场景。首先测试该场景下是否通过,不断降低功率直到测试不通过,看最低能通过的功率与3GPP标准功率之间差异为多少,称之为"余量"。余量测试也可以反映用户在使用不同终端时的体验差异,目前通常用于厂家的定制化测试中。射频性能测试是车载终端导航定位性能测试的一个基础部分。本文将以极限值测试方式为例,说明车载终端的GNSS射频性能测试方法。
5、车载导航定位射频性能测试方法
5.1、导航定位射频性能通用方法
用卫星信号源模拟卫星信号的车载导航定位性能测试系统如图1所示。多系统导航信号源用于模拟卫星信号,被测终端通过射频线与信号源连接,车载终端通过串口线反馈定位结果信息。
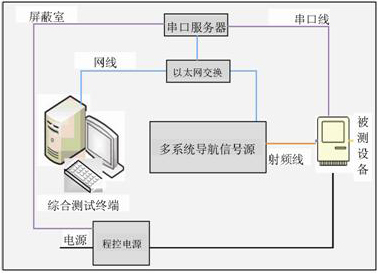
图1、车载导航定位射频性能测试系统
车载终端导航定位射频性能路测系统通过天线接收实际卫星信号进行测试,可以完成对天静态、对天动态性能实场测试,基于采集的卫星信号和记录的位置信息,可以进行虚拟路测。路测和虚拟路测系统如图2所示。
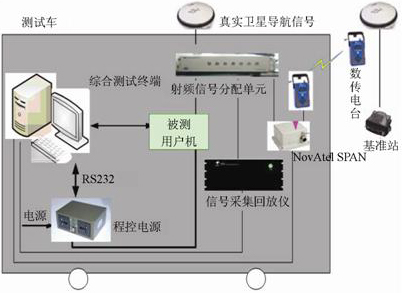
图2、车载导航定位射频性能路测和虚拟路测系统
不管采用实验室模拟测试、场测还是虚拟路测方式,车载导航定位射频性能测试项目都主要包括冷、热启动下首次定位时间、捕获灵敏度、跟踪灵敏度、失锁重捕时间、定位测速精度等。
基本测试方法与普通民用终端导航定位性能测试方法类似。另外,针对车载终端的应用场景,为了评估用户在使用时的体验性能,终端厂家一般还会增加一些车载特殊场景下定制化的定位测速精度。例如,起步场景(可以设置为静止120s,20s内匀加速到120km/h,然后保持匀速直线前进)、高速行驶场景(可以设置为保持速度为120km/h匀速直线运动)。
5.2、紧急情况下车载定位报警系统导航定位测试方法
对于紧急情况下车载定位报警系统导航定位测试,目前的测试系统一般采用图1的方式,测试项除了通用方法中提到的测试项之外,还有一些特殊测试项。以俄罗斯ERA GLONASS GOST 55534 标准为例,还包括检查
- 北斗卫星导航试验系统(北斗一代)(02-04)
- 基于铁路巡线的导航定位终端的设计 (11-30)
- 基于ARM的GPS接收机系统设计(03-06)
- 便携式仪器在射频测试中扮演的角色(09-02)
- 模块化仪器应对射频测试的复杂需求(08-08)
- 如何保物联网传输质量 射频测试受关注(05-12)