| 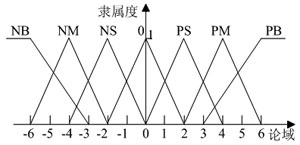
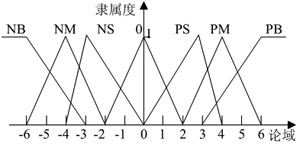
图6 Y的隶属度函数曲线
由于当输出电压误差较小时,仅靠降压环节的脉宽调整就能使电压稳定,所以在偏差较小时隶属度函数的形状要缓一些。输入输出变量的隶属度函数曲线是建立语言变量赋值表的依据,对于三角形的隶属度函数,赋值表中的隶属度可按以下公式计算:
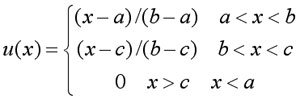 (1) (1)
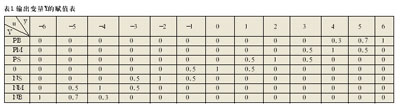
其中,a表示三角形左端对应的X轴的值,b为三角形顶端对应的X轴的值,c为三角形右端对应的X轴的值。表1为输出变量Y的语言变量赋值表,偏差和偏差变化率的语言变量赋值表格式和计算方法与此类似。
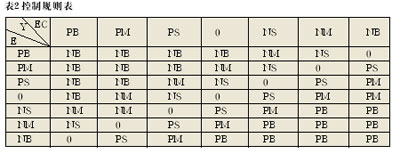
2 模糊控制规则的建立
本设计的模糊控制规则主要就是根据降压环节输出电压偏差和偏差的变化率确定汽油机油门开度的变化,原则就是当偏差较大时选择控制量以尽快消除误差,当偏差较小时,选择控制量防止超调,以系统稳定性为主,选用if E and EC then Y 的形式,可建立如下的控制规则表。
在建立模糊控制规则之后,我们可以计算每条规则的模糊关系Ri,这些模糊关系之间具有或的关系,因此描述整个控制系统总的模糊关系为R=R1∨R2∨R3……Rn。
3 模糊控制查询表的生成
有了描述整个系统的控制规则的总模糊关系R后,接下来便是基于推理合成规则进行模糊推理,根据输出电压偏差和偏差变化率的赋值表求取控制量输出。由于模糊推理的结果是一个模糊集合,它反映的控制量输出语言变量属于其论域中各元素隶属度大小的一种组合,要想获得精确的输出量必须进行解模糊化处理即输出信息的模糊判决,方法通常包括最大隶属度法、中位数法、加权平均法等,本设计采用加权平均法,其算法公式为:
 (2) (2)
其中,xi为离散论域中的元素,u(xi)为每个论域元素上的隶属度。计算所得的精确控制量再乘以比例因子,就得到实际的控制量。为了减小计算量,不必每次输出都进行模糊推理和模糊判决,我们可采用建立模糊查询表的办法,按照先前的步骤对E和EC离散论域中的元素分别进行模糊化,然后通过模糊推理和模糊判决得到对应的属于控制量离散论域的精确控制量Y,最后将所得结果制成模糊控制表,本系统模糊控制表如表3所示。
|