设计高性能、低成本的笔记本电脑处理器电源
大电容的等效串联电感(ESL)应该足够低,以便在负载出现阶跃时抑制高频振铃。
ESL=Cz×Ro2×Q2,其中,对于临界阻尼系统来说,Q2被限制为2。
如果大电容的ESL太大了,则可以增加陶瓷电容的数量,或者采用ESL较小的大电容。
MOSFET的选择
降压电源中的MOS功率器件需要具有很低的RDSON,以使导通损耗和功率耗散最小化。它们还要求很低的输入电容,以最大限度减少导通时间。更快且CISS更低的器件具有更高的RDSON,因此需要在这几个指标之间进行折衷。由于采用MOSFET驱动电路,所以栅极驱动电压被限制为5V,这样,具有逻辑电平阈值的MOSFET便成了唯一选择。来自主电流和纹波电流的功率耗散是同步MOSFET功率损耗的主要组成部分。
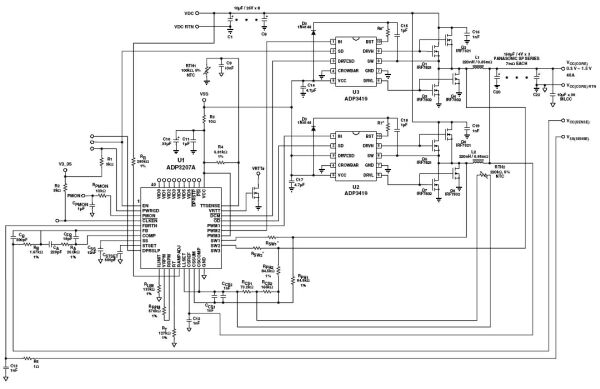
图2:ADP3207A的电路实例。ADP3207A在处理器选择低功耗工作时,可以变换到单相工作模式。
如果逆传输电容在开关节点变为高电平时将足够多的电荷耦合到栅极上,同步MOSFET可能会意外导通。这会导致主器件和同步器件同时导通的直通现象(shoot-through)。为防止这种情况出现,可以使用一个反馈电容,并使它与同步器件上输入电容的比值为1:10或者更低。
同步MOSFET的关断时间应该小于每相的MOSFET驱动器的非重叠死区时间(dead time)。举例来说,ADI公司的ADP3419 MOSFET驱动器的输出阻抗为1.5Ω,其典型的死区时间为45ns。如果使用一个典型栅电阻为1Ω的MOSFET,并让RC时间常数小于45ns,则总的栅电容值的上限为9,000pF。当使用两个并联MOSFET时,每个栅电容应该小于4,500pF。
高压端的MOSFET要求能承受导通电流和开关损耗所产生的功耗。开关损耗来自于开关的导通和关断,因此这些FET的输入电容值必须小于同步MOSFET的输入电容值。
需要注意的另一问题是每一相驱动电路的损耗。每个驱动器的总待机功耗加上提供栅电荷时对应的功耗,应该小于驱动器在最高环境温度下的热耗散极限。对于工作在温度可高达90oC的PCB上的 SOIC封装来说,0.5W的总耗散对应120oC的结温。
推荐的输入电容值
高功率侧的MOSFET的漏极电流近似于方波,其占空比等于n×Vout / Vin,最大输出电流幅值则乘以1/n。为滤除输入纹波,必须保证输入电容的ESR很低,具体值根据最大RMS电流来确定。这个RMS电流为
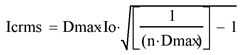
在最小8V电池电压条件下,当最大占空比Dmax为0.144时,从式(5)可以得出Icrms等于9.05A。
电容器制造商给出的电流额定值可能是根据2,000小时的使用寿命给出的,因此必须使用额定值高于采用计算出的Icrms时的电容值。
输入电容值由可接受的纹波量来决定。电容的ESR和AC电流必须很低以满足系统要求。
对快速负载变化的响应
控制器必须对最大的负载阶跃和负载释放进行有效响应。每相导通延迟过程非常长的老式架构的响应速度还不够快,控制器、驱动器和MOSFET也必须有足够快的响应速度,以便满足实时VVID变化的要求。
较早的单边沿设计是等到下一个时钟循环才对控制器在非工作状态下发生的负载瞬态做出响应。它们一次只能对一相提供时钟驱动,从而迫使电源从大电容获得电流。
更新的控制器则通过异步校正来减少负载阶跃响应时间,并同时减少电容器的数量。它们可以立刻导通所有的相来为CPU提供电流,而不会导致内部时钟的延迟。
同步降压控制器(如ADI的ADP3207A)可以对突然的负载变化做出响应。它们可以让所有相都与负载的阶跃同步导通,无需等待即可提供最大电流。它们对最坏情况下的阶跃的全相响应时间一般为1μs或更少。在最初的负载阶跃需求得到满足后,负载可以得到额外的电流供应,随后系统进入正常工作状况,因此纹波量并不会增加。
为了应对大的负载阶跃,有些控制器同时导通所有的相。它们当中的大多数都使用线性传递函数特性来消除负载变化带来的影响并控制输出。但ADP3207A却使用非线性增益来响应负载阶跃。最大负载阶跃的大信号使系统传递特性处于传递函数的高增益段,从而让所有的输出相都导通。较小的负载阶跃对应传递函数曲线的低增益部分,从而可用标准的PWM方式来独立调节每一相输出。这样做的好处是抗噪声性能更好、抖动更低,因为大多数噪声将作用在传递函数的小 信号、低增益部分。具有恒定高增益的控制器更容易受噪声影响。
大多数的移动应用需要使用两相电源,但这些控制器可以轻松配置成支持三相电源工作,以保证更高效率。每相输入电流会随着相数的增加而下降,因此电池在给定时间内的电流消耗也会相应降低,当然代价是需要额外的元器件,于是成本和空间占用相应上升。
图1给出了当负载出现阶跃,所有相都导通时的响应情况,本例子使用了两相电源。
移动控制器需要在
- 单收/单发RS-232接口芯片 ADM101E及其应用(01-25)