高压浪涌抑制器取代笨重的无源组件 并更易于满足 MIL-STD-1275D 要求
军用车辆中的电子设备面临一些独特挑战,其中的主要挑战是须靠反常的电源工作。由于意识到这种在现场发生难以轻易解决的电源波动问题,美国国防部制定了 MIL-STD-1275D 规范,该规范将 28V 电源供电的军用车辆电子系统的要求设定为标准要求。设计能够承受 MIL-STD-1275D 浪涌及有关瞬态的系统,传统上需要大型和昂贵的无源组件。凌力尔特的浪涌抑制器产品非常适合保护系统免受这类浪涌影响,同时降低了成本和减小解决方案尺寸。
MIL-STD-1275D 的要求
MIL-STD-1275D 定义了各种情况,最重要的是,对稳定状态工作、启动干扰、尖峰、浪涌和纹波情况做出了规定。MIL-STD-1275D 针对 3 种独立的"工作模式"制定了对上述每一种情况的要求:启动模式、正常运行模式和仅发动机模式。
在描述尖峰、浪涌、纹波以及其他要求的细节之前,先来看一下工作模式。毫不奇怪,"启动模式"描述的是引擎启动时发生的情况;"正常运行模式"描述的是系统无故障运行时的情况;"仅发动机模式"描述的是一种特别恶劣的情况,即电池断接和发电机直接给电子设备供电。
仅发动机模式是一种非常富挑战性的情况。通常,尽管发电机电源波动,但电池保持相对恒定的电压,因此掩盖了发电机的不稳定性。可以预料,为仅发动机模式设定的限制比正常工作模式严格。在大多数情况下,如果一个系统能够通过在"仅发动机模式"情况工作,那么该系统在正常运行模式时不会有任何问题。(一种可能的例外是,与处于正常运行模式的 20mΩ 源阻抗相比,仅发动机模式的 500mΩ 源阻抗在浪涌期间可以减轻负担。)
稳定状态
与任何标准都类似的是,MIL-STD-1275D 详细解释了各种情况和要求。本文的目的是,以更加容易理解的形式介绍这些要求以及建议采用的解决方案。如需更加准确地了解各种定义和要求,请查阅 MIL-STD-1275D。
MIL-STD-1275D 给出的"稳定状态"定义是:"电路值保持基本恒定的情况,这种情况在所有初始瞬态或波动情况平复之后出现。在这种情况中,还有一点也是明确的,即在系统正常运行期间仅发生固有或自然变化 (即系统没发生故障,对系统的任何部分都未进行意外更改)。"
简言之,在稳定状态,输入电压保持相对恒定。
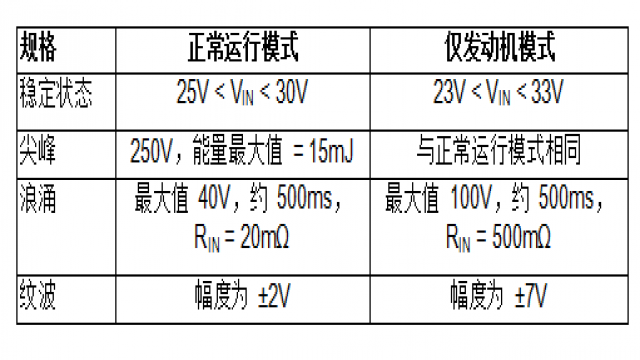
如表 1 所示,在正常运行模式,稳定状态输入电压范围为 25V 至 30V。在仅发动机模式 (发生电池断接情况),稳定状态电压范围稍微宽一些,为 23V 至 33V。
表 1:在正常运行模式和仅发动机模式, MIL-STD-1275D 的一些规格
尖峰
这里我们不引用 MIL-STD-1275D 的"尖峰"定义,而是看看图 1 中所示例子。尖峰一般是震荡性的 (振铃),并在 1ms 时间内逐步衰减到稳定状态电压。MIL-STD-1275D 申明,这类尖峰发生在切换电抗性负载之时,也可能发生在鸣响号角、操作舱底泵、启停引擎或旋转枪架期间。
尽管上述描述在理解尖峰时是有用的,但是实际要求是由图 2 定义的 (就仅发动机模式而言)。此外,在 5.3.2.3 小节"输入 EDUT 的电压尖峰"中,MIL-STD-1275D 描述了推荐的测试配置以及所需的上升时间和震荡频率。需要提到的一个重要事实是,能量最大值限制到 15mJ。对正常运行模式的尖峰要求与仅发动机模式类似,只是正常运行模式限制是 40V (在 1ms),而不是 100V (在 1ms)。
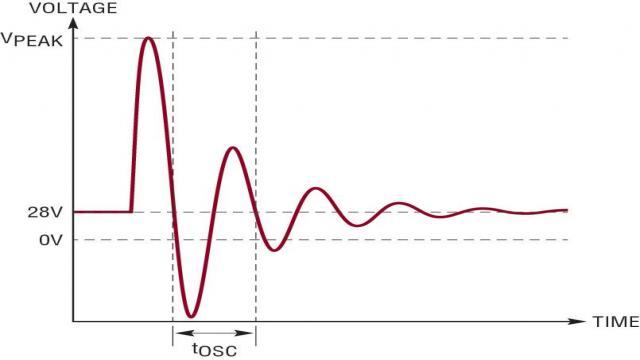
图 1:MIL-STD-1275D 尖峰
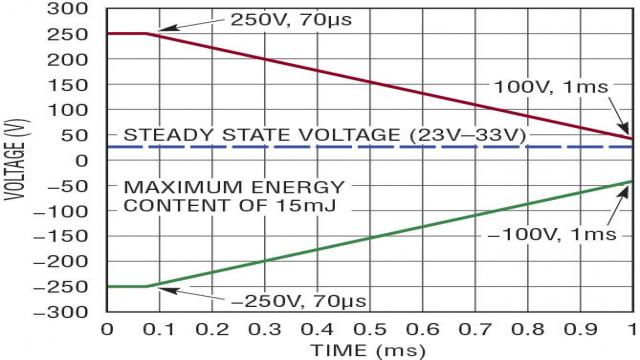
图 2:仅发动机模式的尖峰包络
浪涌
尖峰是持续时间不到 1ms 的瞬态;浪涌则是持续时间较长的瞬态。图 3 显示了对仅发动机模式的限制。请注意,MIL-STD-1275D 推荐进行的测试规定,应该以 1s 的重复时间,给系统输入加上 5 个持续时间 50ms 的 100V 脉冲。有趣的是,图 3 所示浪涌情况的包络要求比较难以满足,因为该浪涌未在全部 500ms 时间内保持 40V。本文所示解决方案满足了这些情况的要求。就浪涌而言,对正常运行模式的要求是较为容易;正常运行模式的浪涌包络类似,除了电压最大值是 40V 而不是 100V。如需了解本文未涉及的详细信息,读者应该参阅实际的 MIL-STD-1275D 规范。
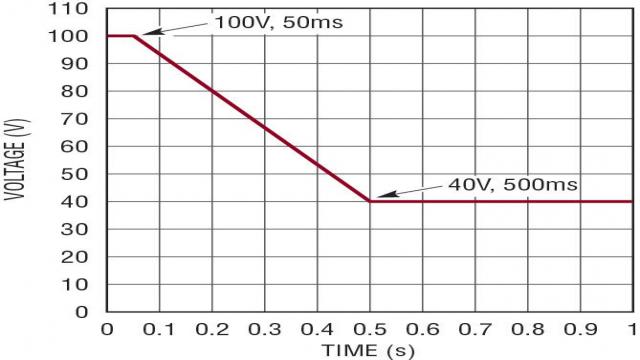
图 3:仅发动机模式的浪涌包络
浪涌 抑制器 MIL-STD-1275D 凌力尔特 相关文章:
- 浪涌抑制器IC简化了危险环境中电子设备的本质安全势垒设计(08-19)
- 如何安装浪涌保护器(06-29)
- 80V浪涌吸收器原理与设计(07-18)
- 用于高压浪涌保护装置测试设备的设计(03-06)
- 高电压浪涌抑制器可确保电源浪涌期间的可靠操作(07-30)
- 开关电源产生浪涌电流的原因(06-12)