如何从负脉冲获得正脉冲
本例中的电路可将负脉冲转换为正脉冲。尽管这个任务看似简单,但负脉冲的幅度为-5V~-2V。按照不同应用要求,正脉冲也需要不同的脉冲宽度,而负脉冲是梯形的。脉冲必须先经过一个长距离的传输线才能到达某个控制设备。有多个电路可以解决这一问题,具体要看脉冲幅度以及形状。
图1给出了一个电路,它只需要一个5V的电源。它有高的触发器阈值,最大限度提高了噪声抑制能力。本电路需要一个大的输入电流,它可以与集电极电流相比拟。另外,它还需要一个CMOS或TTL(晶体管-晶体管逻辑)反相器,用于阈值电压下的触发。如果输入脉冲为梯形,则输出脉冲宽度不等于输入脉冲的宽度。可以这样计算阈值V T- :VT-=-[(V+ -V IH)×R1/R2+0.62],其中, V T-为较低的电压阈值,V+是电源电压,而VIH是74HC132的高电平输入电压。图2显示了输入与输出波形。
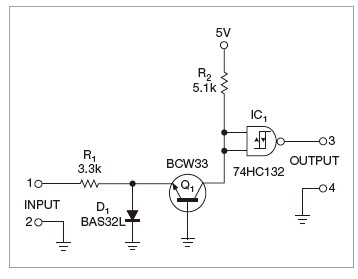
图1,本电路使用单一电源,有良好的噪声抑制能力,但不能可靠地转换梯形脉冲。
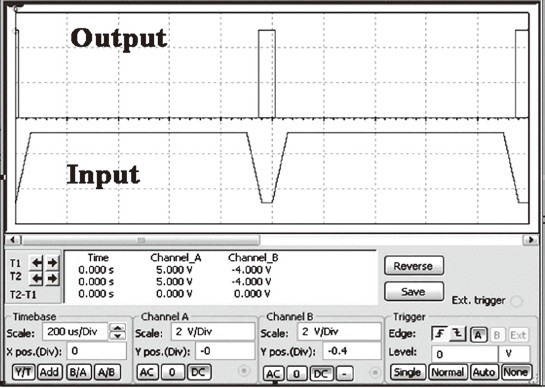
图2,输出脉冲宽度近似于输入脉冲的主要负极部分
图3是一个脉冲整形器,它将3μs的负极脉冲转换为正脉冲。输出脉冲的宽度非常接近于输入脉冲的宽度。本电路不需要大的输入电流,也不需要反相器。它的电压阈值低于图1中的电路:V T- ≥-0.3V,但图3中的电路需要两个电源电压:±5V。图4给出了图3中电路的波形。
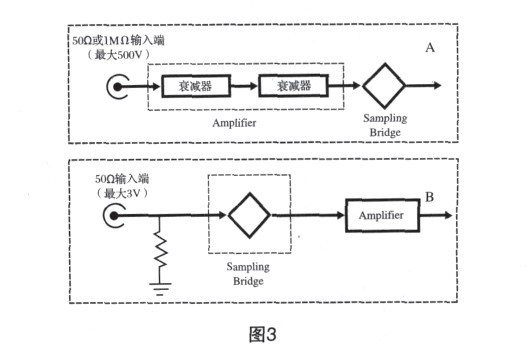
图3,可以用这个电路转换脉冲极性,但它需要双电源。
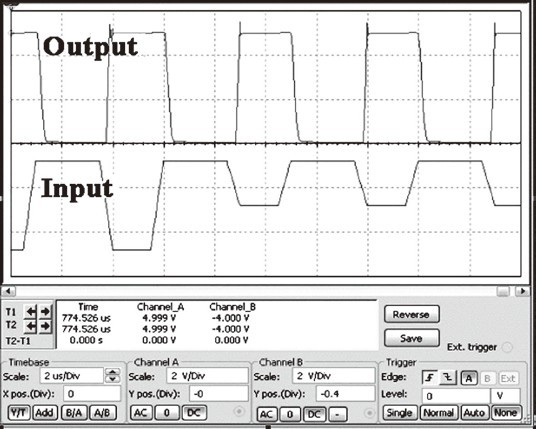
图4,脉冲宽度最小为3μs。
本例中的电路可将负脉冲转换为正脉冲。尽管这个任务看似简单,但负脉冲的幅度为-5V~-2V。按照不同应用要求,正脉冲也需要不同的脉冲宽度,而负脉冲是梯形的。脉冲必须先经过一个长距离的传输线才能到达某个控制设备。有多个电路可以解决这一问题,具体要看脉冲幅度以及形状。
图1给出了一个电路,它只需要一个5V的电源。它有高的触发器阈值,最大限度提高了噪声抑制能力。本电路需要一个大的输入电流,它可以与集电极电流相比拟。另外,它还需要一个CMOS或TTL(晶体管-晶体管逻辑)反相器,用于阈值电压下的触发。如果输入脉冲为梯形,则输出脉冲宽度不等于输入脉冲的宽度。可以这样计算阈值V T- :VT-=-[(V+ -V IH)×R1/R2+0.62],其中, V T-为较低的电压阈值,V+是电源电压,而VIH是74HC132的高电平输入电压。图2显示了输入与输出波形。
图1,本电路使用单一电源,有良好的噪声抑制能力,但不能可靠地转换梯形脉冲。
图2,输出脉冲宽度近似于输入脉冲的主要负极部分
图3是一个脉冲整形器,它将3μs的负极脉冲转换为正脉冲。输出脉冲的宽度非常接近于输入脉冲的宽度。本电路不需要大的输入电流,也不需要反相器。它的电压阈值低于图1中的电路:V T- ≥-0.3V,但图3中的电路需要两个电源电压:±5V。图4给出了图3中电路的波形。
图3,可以用这个电路转换脉冲极性,但它需要双电源。
图4,脉冲宽度最小为3μs。
图5中的电路更进了一步。它使用一只廉价的LM211或LM311 IC比较器,产生的正输出脉冲完全相等于输入脉冲的宽度,而电平可调。电阻R3与R4设定了比较器的阈值电压,但它取决于负电源的电压值。用方程VT-=[V-/(R2+R4)]×R4可以计算出阈值电压,其中V-是负电源电压。图6给出了电路的波形。
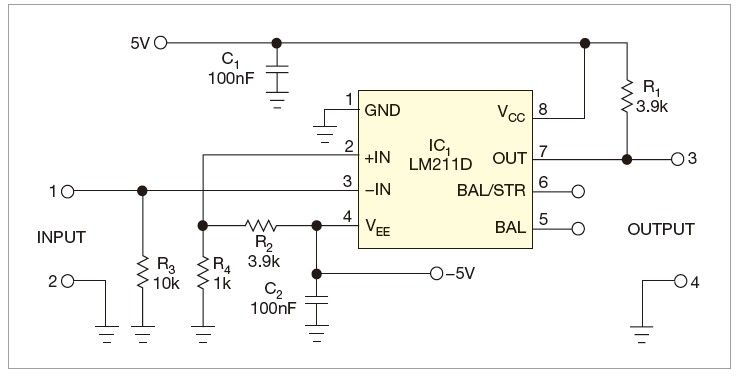
图5,电路中的一只比较器产生出精确的脉冲宽度。

图6,正输出脉冲与负输入脉冲的宽度基本相等。
如果脉冲宽度为2μs或更长,可以使用不太贵的LM211比较器。否则,应采用一款高速比较器。这样就无需额外的输出电阻R1。LM211需要这个电阻的原因是,该IC是集电极开路电路。这种电路需要两个电源电压。
图7中的电路可以将负极性脉冲转换为正脉冲,而输出并不依赖于输入脉冲的幅度。这一版使用的是单电源和一只555定时器。它产生所需要宽度的正输出脉冲。电阻R1与R3建立了一个饱和阈值。可以用VT-=V+/3×(1-2R3/R1)计算此阈值,其中V+为555定时器的电源电压。电阻R2与电容C1设定脉冲宽度。方程 t=1.1R2C2计算输出高态的持续时间。为了让电路正常工作,饱和脉冲必须短于所需要的脉冲宽度,而脉冲周期则必须大于t。电阻R3必须至少为1.5kΩ。电阻R4可选。
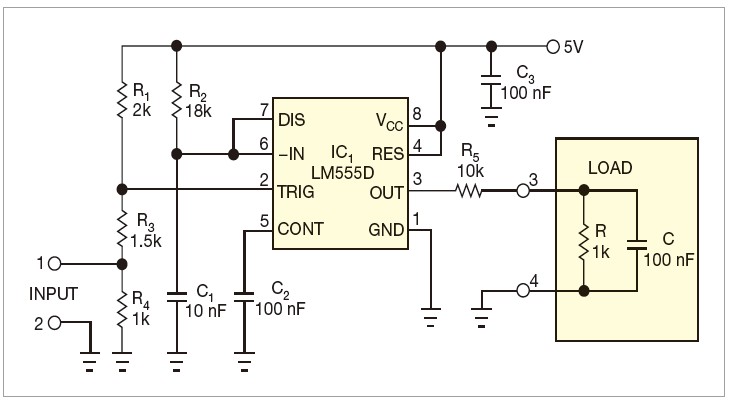
图7 本脉冲转换器使用了一只555定时器
与图1、图3、图5中的电路相比较,图7中的电路运行在低电阻负载上,输出可拉入或供出电流达200mA,或可工作在大电容负载下。电路不需要额外的反相器或驱动器。电阻R5用于保护IC,防止输出端短路。
图8给出了电路的波形。

图8 图7中的555定时器产
- 电子爆竹电路设计原理图(08-11)