数字化中频SPWM逆变电源控制系统
电压出现较大的超调。
3.2系统中心值的整定:
在用数字实现的过程中,我们要注意使得进行比较的相应的电压、电流、三角载波的中心值要一致。否则,会导致输出电压波形畸变。逆变器的输出电压,经过调理电路,送到DSP的A/D模块的模拟输入通道的正弦信号为中心值为1.65,幅值不超过1.65的单极性交流信号。逆变器输出电压的采样正弦信号,进入DSP的A/D模块进行转换后, 采样正弦信号数字量为:
 (1)
(1)
反馈电压信号 的中心值为512,基准正弦信号
的中心值为512,基准正弦信号 的中心值和输出电压的周期有关,两者的中心值经常会不统一。为了便于软件的实现,将两者的中心值均定为512。因为有:
的中心值和输出电压的周期有关,两者的中心值经常会不统一。为了便于软件的实现,将两者的中心值均定为512。因为有:
 (2)
(2)
即电压误差 是中心值为零的正弦信号。也就是,进入电压调节器的是中心值为零的正弦信号。
是中心值为零的正弦信号。也就是,进入电压调节器的是中心值为零的正弦信号。
由于反馈电流 的中心值为512,故电压调节器的输出需加上数字量512,得到中心值为512的
的中心值为512,故电压调节器的输出需加上数字量512,得到中心值为512的 。有:
。有:
 (3)
(3)
电流误差信号 的中心值为0,由于三角载波的中心值为也是输出电压的周期有关,即与三角载波进行SPWM 控制的信号的中心值必须是一样的。因此,电流误差信号必须加上三角载波的中心值,才能与三角载波进行SPWM 控制。
的中心值为0,由于三角载波的中心值为也是输出电压的周期有关,即与三角载波进行SPWM 控制的信号的中心值必须是一样的。因此,电流误差信号必须加上三角载波的中心值,才能与三角载波进行SPWM 控制。
3.3 使用改进的PI算法:
在实际应用中,考虑到一些具体情况,还需对PI调节加以一定的限制,针对不同的情况采取最佳控制方法。
系统中设置偏差阈值 ,当
,当 ,PI控制取消积分作用,用P控制;
,PI控制取消积分作用,用P控制; ,引入积分作用。该方法的实质是:当被控量与设定值的偏差较大时,取消积分作用,以免积分作用使系统的稳定性减弱,超调量加大;当被控量接近设定值时,加入积分作用,以便消除静差,提高控制精度。
,引入积分作用。该方法的实质是:当被控量与设定值的偏差较大时,取消积分作用,以免积分作用使系统的稳定性减弱,超调量加大;当被控量接近设定值时,加入积分作用,以便消除静差,提高控制精度。
可设逆变器的输出的电压的上限 ,下限值为
,下限值为 。执行如下操作:当
。执行如下操作:当 时
时 ,取消积分运算;当
,取消积分运算;当 时,
时, ;取消积分运算。即通过限幅防止控制量的饱和,控制量的饱和主要是由于积分项的饱和而引起的。积分饱和会导致被控量出现较大超调和长时间的波动,这对控制系统是不利的。
;取消积分运算。即通过限幅防止控制量的饱和,控制量的饱和主要是由于积分项的饱和而引起的。积分饱和会导致被控量出现较大超调和长时间的波动,这对控制系统是不利的。
当在输出变化较小时,通过计算得到的PWM控制寄存器的值可能也会有小幅度的振动,这样会使系统不稳定。若设置适当的死区范围,则可以消除由此引起的振荡,又不会太大影响输出精度。

时,u(k)=u(k-1),控制量保持不变;当 ,按照PI算法,计算输出控制量
,按照PI算法,计算输出控制量 。其中
。其中 为死区的阈值,依据系统的控制精度的要求来确定。设置死区可以减少执行机构的频繁动作,增强系统运行的稳定性。
为死区的阈值,依据系统的控制精度的要求来确定。设置死区可以减少执行机构的频繁动作,增强系统运行的稳定性。
3.4 保护控制:
数字化控制的电源系统中,一般设置保护硬件和软件两套保护系统,确保出现故障能有效保护。通常是由硬件电路负责故障状态的快速检测,再通过软件或硬件保护及时封锁开关管的驱动脉冲。逆变器系统中保护及监控部分通常包括过/欠压,过/欠流等。故障保护的监控过程为:通过采样及A/D转换将各种信号的数字量送到DSP,与相应的保护门限值进行比较,若超过门限值则采取保护措施。这样不仅实现简单而且还可以监控各类故障,便于维护。由于故障保护是需要实时监控的,而且一旦发生故障应及时采取相应措施控制输出。因此应在主程序中对各保护状态量进行实时查询。
4 软件设计
通过前面的分析我们可以知道,逆变桥的SPWM信号由片内PWM模块实现,波形的控制和调节都需要在PWM调节周期中完成,属于定时器管理事件。在进行电压调节器、电流调节器计算时还需要实时获得、处理采样值,这里主要利用片内A/D模块。另外,在和单片机进行通信时可以利用SCI口实现,各类保护则是需要不断查询各个状态量,根据其具体数值采取相应的动作。系统软件总的流程框图如图2:
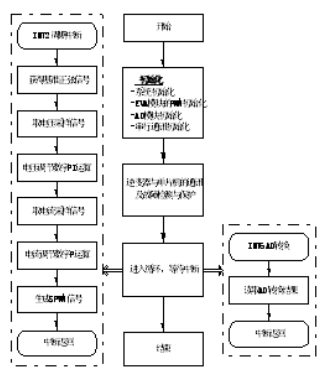
图2系统软件的总体结构流程框图
程序首先对一些寄存器进行设置,并且初始化所有的变量。然后使能所需的中断,启动定时器。开始执行后台一些对实时要求不高的程序,比如通讯等功能。CPU的中断INT2,INT6按照一定的时间打断后台程序的执行,让CPU执行一些实时要求高的程序,比如正弦波发生程序,电流、电压采样。
因为本系统对软件的实时处理能力要求很高,所以绝大多数功能模块是在中断子程序中完成的。而且由于系统的功能模块繁多,所以各模块应根据系统的要求严格按照先后顺序执行,以保证各模块互不干扰,协调工作。INT2为定时器的中断子程序,是最重要的一个子程序,在该子程序中主要完成对逆变器的控制,因此其中断优先级最高。一旦出错那么整个系统的
- 皮卫星智能航天电源系统设计(03-22)
- 数字化变电站中的光电互感器设计(07-08)
- 数字化控制UPS中电池电压的检测方法 (11-17)
- 一卡通智能卡在数字化医院的综合应用(08-12)
- 数字化电源发展成为LED智能照明恒流驱动电源"二次革命"(05-01)
- 数字化采样仪的革新与发展(02-02)