一种中小功率的高频开关式通信电源的设计
电压也会越高,从而增大了副边整流二极管的电压应力。
从这个意义上来说,阻断电容不宜过小。所以,阻断电容的选取,是在可以保证二极管自然换流的前提下,越大越好。
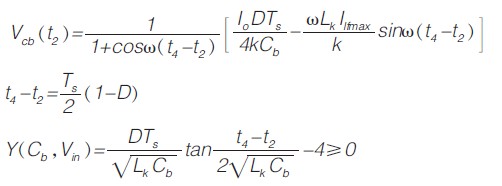
从图3 中可以看到,二极管t3在时刻换流结束。最坏的情况是,在电压开始建立的时候,二极管刚好换流结束,也即t3=t4时。此时,ip减小到最小值:
而在t2时刻:
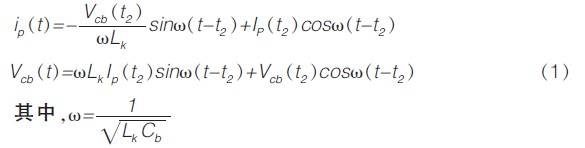
在t2~t3时间段内,原边电容和漏感谐振,阻断电容的电压、原边电流为:
所以二极管能够自然换流的条件是:

上式推出了二极管在t4时刻完成换流的条件, 它与阻断电容上的电压Vcb有关。
在t0~t2时间段内:
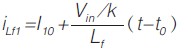

其中,k 为原副边匝比。I10、I20分别为iLf1、iLf2在t0时刻的值。
由式(2), 有I10=ILfmax,可以得出ip在[t0~t2]时间段内的表达式:

可以得出,在t2时刻,电容上的电压:
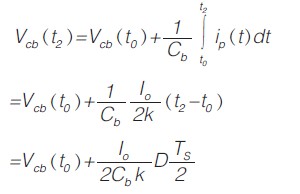
而从式(1)可得:

从上面分析可以推导出:
实际设计中,可以通过该式确定阻断电容Cb的值。
2.2 滤波电感设计
滤波电感有两个作用。一是滤波作用,减小输出纹波,从这个意义上说,电感值越大越好。二是为原边开关管的ZVS 提供能量,电感电流必须可以减小到零且有一定的负值,从这方面来说,电感必须小于一定值。所以设计电感的原则是,在满载能够实现滞后管软开关的前提下,电感取最大值。
3 基于Buck 变换器的小信号模型设计
Buck 变换器只有两种工作模态,即开关管导通和开关管截止状态。
首先为理想的Buck 变换器在一个开关周期内的两种不同工作状态建立状态方程和输出方程。这里取电感电流iL(t)和电容电压uc(t)作为状态变量,组成二维状态向量x(t)=[iL(t),uc(t)]T;取输入电压ui(t)为输入变量,组成一维输入向量u(t)=[ui(t)];取电压源的输出电流is(t),变换器的输出电压u0(t)作为输出变量,组成二维输出向量y(t)=[is(t),u0(t)]T。
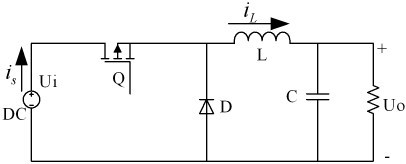
图4 Buck 变换器拓扑图
4 基于倍流整流移相全桥变换器的小信号模型设计
倍流整流移相全桥变换器是在BUCK 变换器的基础上推导出来的,两种变换器都是典型的二阶系统。由它的状态空间矩阵得到控制输出的传递函数为:
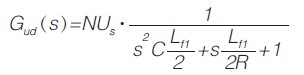
代入相关参数可得到该传递函数的波特图如图5 所示:
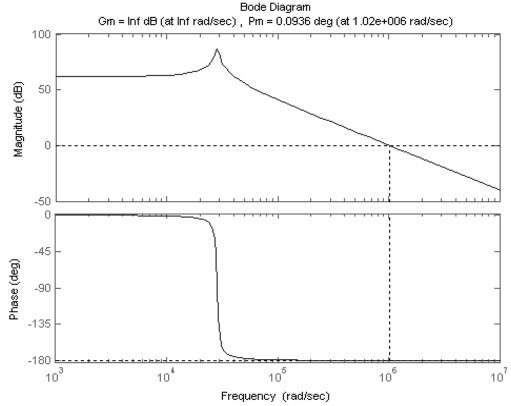
图5 倍流整流移相全桥变换器传递函数波特图
5 通信电源的实验研究
基于以上分析, 本文设计了一个输出电压和输出电流分别为48V 和15A 通信电源的样机,主电路由桥式逆变电路、高频变压器及阻断电容、输出整流滤波电路等组成。外围电路包括采样电路、驱动电路、过流保护电路等的设计。
5.1 采样电路设计
输入电压和输出电压采用线性光耦HCNR201 采样, 如图6 所示。输出电流和输入电流采样采用电流LEM,该方法精确可靠,实现了电隔离,但成本较高,且需要精确的±15V 直流电源。
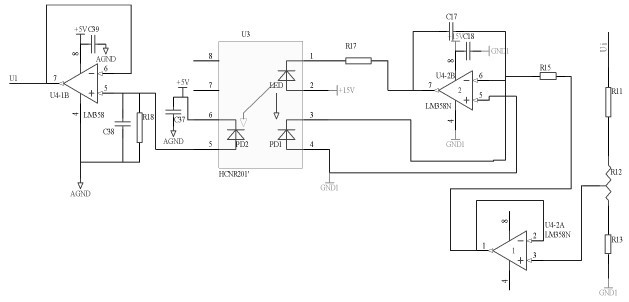
图6 电压采样电路
5.2 驱动电路设计
MOS 型器件的理想驱动波形应有合理的脉冲上升沿和下降沿、足够大的驱动功率、合适的驱动正向电压和反向电压。本电源移相全桥拓扑的四路驱动信号占空比大小固定; 开关频率较高,为100K,要求有较强的抗干扰能力。
5.3 过流保护电路设计
电压型电流传感器(霍尔器件)检测到输出电流,经过RC 电路滤波后送到比较器的正相输入端,而设定的电压给定值接比较器的反向输入端,两个量进行比较,当大于给定值时,说明输出过流,此时比较器输出高电平,三极管导通,发光二极管发光提示过流,同时PDPINTA 为低电平,然后接入到DSP。GPIOA5 送出的是保护信号,当软件出现保护时,GPIOA5 为高电平,其相应的比较器输出为高电平,同样使得PDPINTA 为低电平。
5.4 软件设计
软件设计包括主程序、通信子程序、双环调节子程序、A/D 转换中断、PWM1 和PWM3 产生中断、PWM2 和PWM4 产生中断。
5.5 实验方法和结果分析
在一定的输入电压的前提下,输出功率16W 和8W 时采用突加、突卸负载的方法,应用有积分分离和无积分分离的PID 控制算法,分别得到在常规的PID 控制算法下,突卸和突加负载时的输出电压波形和采用积分分离的PID 控制算法下, 突卸和突加负载时的输出电压波形。实验结果表明:采用积分分离的控制算法,超调量减小,调节时间减小,从而改善了动态性能。倍流整流电路较全波整流来说,占空比丢失小、没有二极管的反向恢复以及滞后管实现软开关更容易。
- 通信电源集中监控技术在通信电源中的应用(06-25)
- 为通信电源设计太阳能光伏方案(02-05)
- 通信电源产业链发展现状与趋势分析(04-20)
- 基于WEB的通信电源的远程监控研究与实现(04-07)
- 高可靠DC/DC变换器模块设计(09-15)