基于TMS320LF2407A的通用式机车信号检测
端供DSP采样。
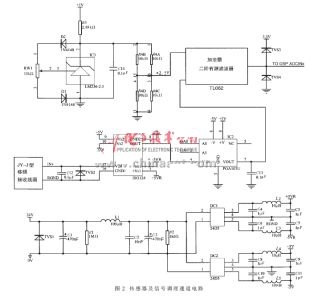
传感器及信号调理通道电路如图2所示。
3.2 八色灯显示驱动及确认电路设计
八色灯显示机为八个24V灯泡,由七个双刀双置继电器控制其亮灭,还有一个电子开关控制灯泡24V电源的开关。八个色灯按安全级别顺序由继电器接成互锁逻辑,每个继电器的两对触点取相反的逻辑经光耦反馈给DSP的I/O端口作为点灯确认信号。DSP依FFT解调的结果输出某色灯点灯信号,然后读取反馈的点灯确认信号来判断点灯是否正确,以防不能正确点灯的事件发生。电子开关除能关闭所有色灯外,还在需要改变色灯时,它能先关断24V灯泡电源,然后DSP再输出点灯信号,使继电器无电换档,延长继电器的使用寿命。
3.3 DSP系统电路设计
DSP为TMS320LF2407A,由于其I/O口有40个之多,故系统的所有输入输出开关量均由DSP的I/O口直接驱动,DSP内带ADC子系统,将处理后的移频信号送入其Ain端,由定时器定时启动。DSP内部程序FLASH空间有32K字,除一部分用于程序空间外,还可以存放八个色灯的语音。考虑到DSP内部WDT的超时复位时间太短,选用MAX706S作μp监控,它提供上电复位、手动复位、超时复位,DSP的电源为由TPS76733提供的3.3V电源。由于篇幅所限,DSP系统电路原理图略去。读者感兴趣可与作者联系。
3.4 最近邻模式识别及车载FSK信号的检测方法
最近邻法是最重要的模式识别方法之一[3]。最近邻法决策规则为:对于n类问题,设类ωi(i=1,2,…,n)有Ni个样本xj(i)(j=1,2,…,Ni)。针对一个待识模式x,分别计算它与个已知类别的样本xj(i)的距离,将它判为距离最近的那个样本所属的类ωi。
FSK信号的模式识别检测方法分为采样、识别和判决三个步骤。将已知类别不同模式的FSK信号选取一定的采样频率和采样点数,分别对其取样后进行FFT变换,并选取各种情况下中心载频附近的若干值构成各已知类别的样本。对于实际待测FSK信号,以相同采样频率和采样点数取样,并作FFT变换处理,选取中心载频附近若干值作为待识模式。根据模式识别的最近邻法决策规则,将待识模式与各已知类别的样本分别进行比较,计算其与各样本的距离,最后将待识模式判为与其距离最近的那个样本所属的类。进行模式识别时应保证相比较的频谱具有相同的频谱分辨率,即对FSK信号取样时应选择相同的采样频率和采样点数。
经过大量的计算机仿真和实时实验得出:对国产移频,选取采样频率为4500Hz,采样点数为1024点,均选取中心载频附近的21个频谱模值作为样本值;对法国UM71移频,选取采样频率为15000Hz,采样点数为1024点,均选取中心载频附近的21个频谱模值作为样本值。采用最近邻模式识别检测法可以准确识别信噪比低于-12dB的信号。
依照这样的方法,对全部国产移频信号及法国UM-71移频信号的各4种中心频率和18种低频调制频率的FSK信号在不同初始相位时进行了实测,均取得了满意的结果。采用最近邻模式识别检测法解调FSK信号可以有效地克服欠采样所带来的采样时间过长的弊端,能够准确快速地识别各低频调制频率。
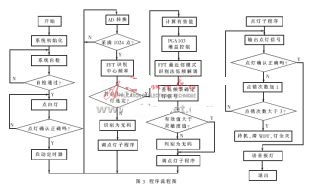
4 程序设计及实验结果
程序流程图如图3所示。
该系统已设计完成并安装试运行。对全部国产移频信号及法国UM-71移频信号的各4种中心频率和18种低频调制频率进行了实测,不仅检测结果正确,实时性亦满足铁路部颁标准。系统信号检测及控制等所有功能仅由一个DSP芯片完成,并配有完备的软硬件抗干扰设计,保证了所设计的系统具有集成度高、实时性好、电路简单、可靠性高等优点。
TMS320LF2407A 信号检测 通用式 机车 相关文章:
- 高性能数字信号处理器TMS320LF2407A及应用(06-21)
- 基于DSP芯片TMS320LF2407A的超声电源系统的控制电路(08-01)
- 基于DSP的触摸式MP3的设计(08-15)
- TMS320LF2407A DSP心电监护系统设计方案(11-29)
- 基于TMS320LF2407ADSP心电监护系统(04-11)
- 基于TMS320LF2407A DSP的心电监护系统研究(05-16)