uCOS-II���ȼ����������PowerPC�ϵ���ֲ���Ż�
μC/OS��Jean J.Labrosse������ʵʱ�������ںˣ������ΪMotorola 8λ������68HC11д�ġ��ں�������������У����߽�������ֲ����PC�ϣ��Ա��ڸ���Ķ���ѧϰ��μC/OSII�̳���μC/OS���㷨����ִ��Ч�ʸߡ�ռ�ÿռ�С��ʵʱ��ǿ�Ϳ���չ�Ժõ��ص㣬����ֲ�������������͵�CPU�ϣ���Ϊ��Ƕ��ʽ����dz���Ӱ������RTOS��Ȼ�������ڸ�ʵʱ�ں���Ϊ8λCPU��Ƶģ�������Щ�������ȼ��㷨Ӳ��ָ���CPU��������ֲ�Ǻܲ����ġ�
1 �������ȼ����������
һ���������ȼ���ʵʱ�������ں˵�������Ȼ�����Ҫʵ�������������ĵĴ������ܣ�
�� ���������ھ���̬��
�� ������ȡ������̬��
�� �ҳ�������ȼ��ľ���̬����
��32λ��������64������ʹ������32λ�����ͱ�������OSRdyTbl [2]������һ��64λ���������̬����;ÿһλ��ʾ��Ӧ���ȼ��������Ƿ��ھ���̬������OSRdyTbl [0]�ĵ�4λΪ1��ʾ���ȼ�Ϊ4�������ھ���̬���������µ�������������������������������ȡ�����������Ѱ�ҵ�ǰ������ȼ��ľ�������
������������κδ�������ʵ������Ĺ��ܣ�û�п����κε��Ż��Ľ���ͨ��������ԭ���Ժ��������Ը��õ�����������ں˵�������ȡ�
Ѱ��������ȼ�����̬����ĺ�������Ƶ�ʸߣ���ִ��ʱ��ֱ��Ӱ���ں˵������л��ӳ�ʱ�䣬Ӱ��ϵͳʵʱ�ԡ�����Ѱ��������ȼ��ľ���̬����Ĵ��룬�浱ǰ������������ȼ���ͬ����ѭ������Ҳ��ͬ������������ʱ�䲻ȷ����
2 μC/OS���������ʵ�ַ���
μC/OS��μC/OSII��Ϊ8λCPUд�ģ�����8λ���㷨��֧��64������ʹ��8���ֽڵ�OSRdyTblȫ�����飬��ʾ��������ľ���̬��Ϣ��1Ϊ���������0Ϊ�Ǿ����������һ���ֽڵ�b0λ����64�����������ȼ���ߵ��������һ���ֽڵ�b7λ�������ȼ���͵Ŀ���������ԶΪ1����OSRdyTbl ��������ݲ�Ϊ0ʱ����ʾ��Ӧ��8��������������1���������̬������һ�����ֽ�ȫ�ֱ���OSRdyGrp �е���ӦλҪ��1��������״̬�����仯ʱ�������OSRdyGrp��OSRdyTbl�ж�Ӧ��λ��
Ѱ��������ȼ��ľ�������ʱ��μC/OSʹ����Ԥ�ȹ̻���256�ֽڵĶ��ձ�OSUnMapTbl�������ض��ֽ�ֵ�����λ1����λ����Ϣ������㷨��������λ�������ȼ�λ�����ִ��ʱ��IJ�ȷ���ԣ������ִ���ٶȿ죬�����������ٺ����ȼ��ء�
����ȡֵ0��63���������ȼ���μC/OS���仮�ֳɸ�3λ��Y�͵�3λ��X������������������ƿ�TCB��OSTCBX��OSTCBY�У����Ӧ��OSUnMapTbl��ֵ������OSTCBBitY��OSTCBBitX�����У�����������ٶȡ�Ϊ�˱��⺯�������������Ķ������μC/OSֱ�������ʵ�����µ������ֹ��ܡ�
�� ��������������̬
OSRdyGrp "= ptcb��>OSTCBBitY;
OSRdyTbl[ptcb����OSTCBY] |= ptcb��>OSTCBBitX;
�� ���������˳�����̬��
y = OSTCBCur��>OSTCBY;
OSRdyTbl[y] &= ~OSTCBCur��>OSTCBBitX;
if (OSRdyTbl[y] == 0) {
OSRdyGrp &= ~OSTCBCur��>OSTCBBitY;
}
�� Ѱ��������ȼ��ľ���̬������OSRdyGrp��ֵ��ƫ��������OSUnMapTbl�����õ�1��0��7����Y����Ϊ���ȼ���3λ���ٸ���Y��ֵ���ҳ�OSRdyTbl�ж�Ӧ���ֽڣ������ٴβ�OSUnMapTbl�����õ�1��0��7����X����Ϊ���ȼ���3λ��ֵ��ͨ����Y����3λ�ټ���X��ֵ���õ��������������ȼ���ߵ��Ǹ���
y = OSUnMapTbl[OSRdyGrp];
OSPrioHighRdy = (INT8U)((y << 3) + OSUnMapTbl[OSRdyTbl[y]]);
μC/OS����������㷨�������Կռ任ʱ��IJ��ԣ����ض��ֽ�ֵ�����λ1����λ����ϢԤ�ȼ��㲢���浽���У�����ʱͨ��������ٵõ���ÿ�������TCB�г��˱������ȼ���Ϣ�����⣬��ʹ�ö����4���ֽڱ������ȼ��ĸߵ�3λ�Ͷ�Ӧ��OSUnMapTblֵ���Ա�������ʱʵʱ�����⼸��ֵ���������ӳ١���Щ��ʩ������ϵͳROM��RAM�Ŀ�����
3 ����PowerPC"����ǰ������Ŀ"ָ��ʵ���������
PowerPC��Motorola ��IBM��Apple���ҹ�˾��20����90�������������Ƶ�32λCPU��Freescale����ǰ����Motorola�뵼�岿����չ������������ӵ�MPC5xxϵ�е�Ƭ������������e200�ں˵�MPC5xxxϵ�е�Ƭ�������߶˵�e500��e600�ں�������ͨ�������MPC6xxx��7xxx��8xxxϵ�С�
�����μC/OS�������ȼ������㷨�ĸĽ����Ż�����MPC5554��Ƭ����ʵ�ֵġ�
PowerPC����������һ��"����ǰ������Ŀ" ��ָ��cntlzw(count leADIng zero word)��������Ӳ��ָ�ʽʵ�����ȼ��Ķ���������㷨������ָ��Ҳ������ͼ�������㷨���ܵij��ϡ���ָ������һ��32λ�Ĵ�����ǰ�������Ŀ�����磬����0��ʾb0��Ϊ�㣬��û��ǰ���㣻����3��ʾb3��Ϊ�㣬b3λ��ǰ���b0��b2����3���㣻����32��ʾRS�Ĵ��������е�λ��Ϊ�㡣����PowerPC�ܹ��У����λMSB��ʾΪb0����λMSB����λ����ʾΪb7��b15��b31����
��������ָ��û�����Ը�дѰ��������ȼ��ľ�������ĺ���������Ҫ����ѭ����λ�жϣ�����ֱ�Ӵ�64���������ҳ����ȼ���ߵ��Ǹ����������£�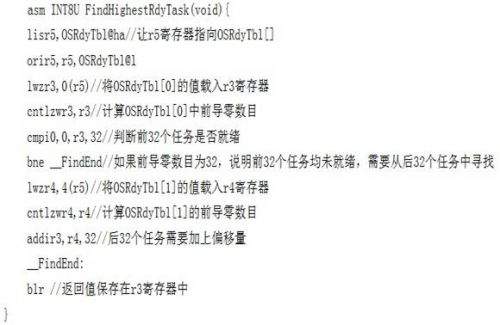
����δ����У������ж�ǰ32�������Ƿ��д��ھ���̬�ģ����û�еĻ����ٶԺ�32����������жϡ��������ȼ���͵Ŀ����������Ǵ��ھ���̬�����Ժ�32���������ܷ���һ����Чֵ���ô�����ǰ32�������о���̬ʱ����7��ָ���ǰ32�������û�о���ʱ��Ҫִ��10��ָ���μC/OSԭ�еĴ����������Ļ���������Ҫ����15��ָ�
ʹ�������������һ���ô��Dz�����Ҫʹ��256�ֽڵ�OSUnMapTbl����������ƿ�TCBҲ����Ҫʹ��OSTCBX��OSTCBY��OSTCBBitY��OSTCBBitX������ÿ��ECB��Ҳ������ҪOSRdyGrp����Ҳ�����˶�ROM��RAM��ռ�á�
4 �Ľ���չ�����������ȼ���������
����μC/OSII֧�ֵ�������������չʱ������μC/OSIIԭ�е���������Ҫ���ոߵ��ֽڷֱ����OSUnMapTbl���ձ���������Ϊ256ʱ��Ѱ��������ȼ���������ĺ�������Ҫ����Լ35��ָ�����ǰ������Ŀ��ָ������������µ����ý���������������32λPowerPC��������������ƵĴ��������������10��ָ��ͽ���������չ��1024����
��ʱOSRdyGrp��չΪ32λ��OSrdyTbl��չ��32��32λ�����顣��OSRdyGrp�õ���ǰ������Ŀ�������������ȼ���5λ��ֵ������4���Եõ����ֵ����ƫ�Ƶ�ַ����OSRdyTbl�У������λ��Ӧ�����ȼ�����λ��Ӧ�����ȼ���������ǰ������Ŀ�����������ȼ���5λ��ֵ����5λ��ֵ��λ��Ӿ͵õ��������������ȼ���ͨ����OSRdyGrp��OSRdyTbl����ɽṹ�壬���ýṹ����ַ�����Ѱַ���ֱ��ȡ����ֵ�����Լ���һ��ȡ��ַ�IJ�����
Ѱ��������ȼ�����̬�����մ������£�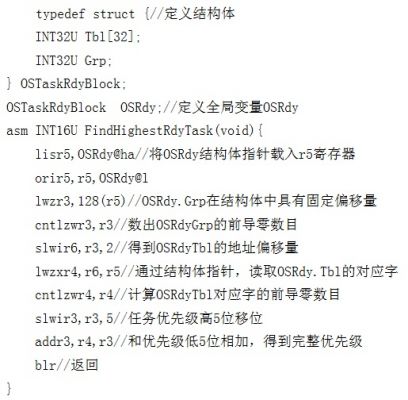
��64λ��PowerPC ����cntlzd(Count Leading Zero Double word)ָ�һ�ξͿ����ҳ�64�����������ȼ���ߵ��Ǹ�����û�б�Ҫʹ��μC/OS��II�е��㷨�ˡ�
- Ƕ��ʽʵʱϵͳ�е����ȼ���ת����(06-10)
- Linux ���̵���ԭ��(04-06)
- Ƕ��ʽϵͳ���ȼ���ת����ķ��� (08-14)
- �������ź������Ե�ʵʱ��������(07-06)
- dz�� PROFINET �������ȼ��������ͽ�����(12-14)
- UC/OS-II��������ȼ�����ҷ�������(12-01)