实时操作系统软件调度器/硬件调度器的设计与实现
3.硬件调度器模型实现
硬件调度器模型将调度的功能完全用专用的硬件IP核实现。见图3,整个系统包含图3中去除协处理器的所有部分。调度模块具有与协处理器相同的功能,但是调度模块完全由时序以及逻辑模块组成,不具有协处理器智能化的特性,其开发难度也相对较大。但是正是由于调度模块采用的时序以及逻辑模块组合的结构,其实现无需程序控制,故调度速度要高于协处理器调度模式。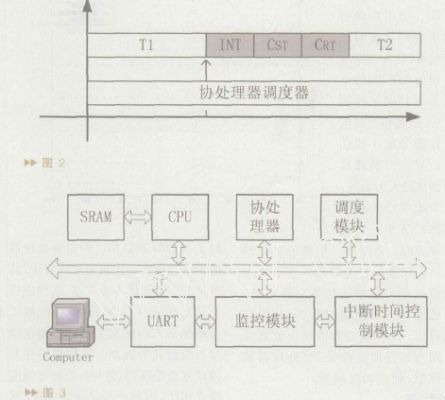
整个调度模块由三部分组成,见图4:调度核、任务管理、通信接口。通信接口将CPU传送过来以及调度核的指令进行翻译转换,实现CPU与调度核之间的通信。调度核控制任务管理,将等待挂起的任务以及最高就绪态的任务号发送给任务管理器,同时与CPU交互信息,从CPU获取系统时间等各种有用信息。任务管理则负责各种任务状态的切换,将调度核发送过来的等待挂起的任务置入等待队列,而将最高优先级的任务标志为运行态,交由调度核并发送给CPU。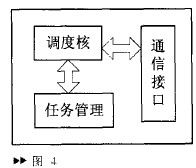
性能测试及结论
为了验证三种调度模型的性能,采用了如下的测试方法。应用程序由10个相同功能的任务组成,任务的序号分别为1到10,每个任务运行确定时间之后,挂起自身而运行任务号加1的任务。异步中断通过外部按键人为触发,一个始终处于挂起态的任务用于接收按键消息,并处理。按键消息处理之后,任务将自身挂起。图5为主机通过串口获取的任务切换信息,并通过matlab绘制的图形。从图可以看出,三种调度器性能由低到高分别为软件调度模型、协处理器调度模型、硬件调度模型。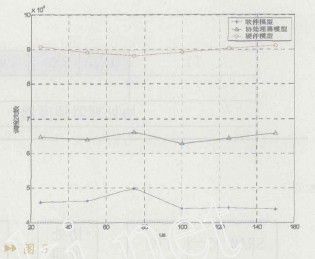
结语
本文介绍了三种RTOS的调度器实现模型,软件调度模型为当前最常用的也最稳定的调度模型,其实现简单,且硬件成本低;协处理器调度模型具有较高的性能,但是由于采用协处理器的支持,无疑增加了硬件成本,RTOS的调度由协处理器完成,减轻了主CPU的负担,但是协处理器的调度过程实际上也由软件实现,其整体的调度速度不是很高,其性能提升 只是在减小主CPU的调度次数以及避免进入内核态上;硬件调度模型具有最高的效率,虽然模块开发调试复 杂繁琐,但是与协处理器调度模式相比,占用更少的硬件资源,而且效率高于协处理器方式,必将极大地提高系统性能。综上所述,三种RTOS各具有自身特点,在具体的实现过程中,需要考虑系统的特性折中选择实现方式。与当前流行的调度模式相比,硬件调度模型具有更高的性能,必将成为今后RTOS发展的一个方向。
- VxWorks实时操作系统下MPC8260ATM驱动的实现(11-11)
- VXWORKS内核分析(11-11)
- 嵌入式实时操作系统设计探讨(10-15)
- 嵌入式实时操作系统μC/OS-II 在P89V51RD2中的移植(04-09)
- LPC2292的伪中断与伪中断处理(03-25)
- 网络处理器IP2022及其在嵌入式牌照识别系统中的应用设计(05-16)