基于TMS320DM642在移动平台ATP技术中的应用
时间:03-19
来源:3721RD
点击:
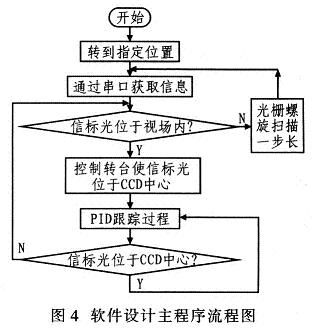
程,直到再次发现目标。整个ATP控制过程主要由扫描、捕获和跟踪3部分组成。图4示出软件设计主程序流程图。
3.1 信标光坐标阈值提取算法
系统首先采用直方图法确定信标光坐标提取的阈值,具体做法:将CCD采集的MxN像素的黑白图像存入数据缓存器,以灰度值(O~255)为x轴,以该灰度值的像素点个数为y轴。由于背景和目标灰度值的不同,必然在坐标系中形成两个峰值,在两峰值之间选取像素点个数最少的灰度值为阈值,可以使目标和背景分割误差最小。
3.2 信标光坐标质心算法
DM642必须精确地从目标图像提取目标位置信息。常用的定位算法:质心算法、形心定位法、峰值定位法、匹配定位法和投影中心法。质心算法的精度高、且算法简单,该系统设计选用质心来定位目标。质心法反映了目标的能量的分布状况。该方法在理想的情况下定位精度小于0.05个像素,且适用的光斑范围大。
4 结论
在脱离PC机情况下对移动平台信标光的捕获与跟踪进行实验。利用载有信标光的小车以不同速率在已设计的线路上运动,控制器控制二轴电控转动平台进行光栅螺旋扫描,一旦捕获信标光则转入到跟踪状态并锁定目标。如果信标光突然脱离CCD视场,程序将自动重新进入扫描捕获状态。
实验表明,系统跟踪角速度范围是0~lOrad/s,跟踪精度优于0.5mrad,基本达到移动平台ATP技术粗跟踪要求,也进一步证明基于DM642的移动平台ATP技术在卫星和航空航天等大容量通信方面具有更大的应用潜力,特别是在改进和优化系统若在灵活性和实时性以及算法,将使ATP系统跟踪精度进一步提高。
TMS320DM642 移动平台 ATP技术 空间光通信 相关文章:
- 基于TMS320DM642的农药喷洒系统(04-22)
- 基于DSP的视频采集驱动程序的实现(07-21)
- DSP并行处理在剖面声纳系统(06-07)
- 基于TMS320DM642的CCD图像采集系统设计(11-14)
- 双DSP的多路视频监控系统设计(02-14)
- 基于FPGA+DSP技术的Bayer格式图像处理(01-13)