基于TMS320DM642在移动平台ATP技术中的应用
1 引言
空间光通信采用激光作为载波。与传统微波通信相比,空间光通信具有传输容量大、方向性强、传输速率大、保密性好等优点,在卫星和航空航天等大容量通信方面具有巨大的应用前景。但由于激光具有波束窄、发散角小的特点,空间太阳、月亮等星体背景光的干扰,加之远距离通信信道对光信号的极大衰减等因素,因而空间光通信能够快速实现卫星、飞机等空间移动平台的捕获、跟踪和瞄准(Acquisition,Track-ing,Pointing,简称ATP),并建立稳定而有效的通信链路。因此,介绍了一种基于DSP的移动平台ATP技术的应用设计。
2 系统硬件设计
2.1 ATP系统架构
为了模拟实验空间移动平台ATP过程,设计一套地面模拟ATP系统。整个系统分为图像处理模块、电机控制及驱动模块、二轴电控转动平台、光学系统等,如图1所示。图像处理模块核心是图像处理器件。采用TMS320DM64(简称DM642)作为图像处理器,该器件是TI公司推出的一款针对多媒体处理应用的高性能定点DSP器件,它具有C64X内核,指令集与(264X全面兼容,其内部工作时钟达600 MHz,指令执行速度高达4 000~4 800 MI/s,它拥有3个独立配置的视频端口,可独立配置为视频采集或显示端口,采用EDMA方式快速地在存储器与视频端口之间传输视频信号,另外DM642还拥有多路音频端口(McASP0),32位主机接口(HPI),PCI总线接口,16位通用I/O端口(GPIO),3个定时器以及I2C总线模块。DM642对CCD采集的图像信号进行图像处理和分析,判断信标光是否进入视场,并利用灰度直方图算法计算目标与背景间的阈值,再利用质心算法得出信标光坐标,并将信息实时传输给电机控制部分。
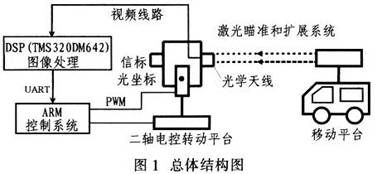
电机控制器采用专门用于工业控制的LPC2114ARM及其外围电路。LPC211ARM采用ARM7TDMI-S核技术,采用RISC指令,流水线执行结构,嵌入式操作系统移植性强。根据DSP处理后的信息调整载有CCD的二轴电控转动平台。
电机驱动器采用新型的双极性恒流斩波驱动技术,光电隔离信号输入,自动半流,可设置最大2 A电流和最大125级细分,振动和噪声小。
二轴电控转动平台按照水平和俯仰两个方向转动,其水平方向无最大角度限制,而俯仰方向接近360°,通过ARM控制器实现该转动平台的方位和俯仰角的精密转动。驱动器为最大值128细分时,其方位和俯仰角的转角精度达2.725μrad和1.635μrad。
光学系统由信标光发射和CCD接收部分组成。CCD有效像素为582(H)×512(V),像素尺寸为8.25(H)μm×7.03(V)μm,接收灵敏度为0.005勒克斯,CCD的视场角为3°x3°。CCD安装于二轴电控转动平台,相当于光学天线,用于接收光信号,通过ARM电机控制实现CCD的全空间扫描和信标光接收。信标光置于单片机控制的小车,模拟实现空间移动平台的运动。
2.2 图像处理硬件设计
该系统设计的图像处理模块采用DM642作为图像处理核心器件以及其外围电路组成的视频通讯模块(VCM)完成CCD视频信号的采集和处理。VCM是由视频处理单元、音频处理单元、SDRAM、Flash、UART、以及网、I2C、JTAG单元等,其中视频处理单元主要由DM642、视频解码器TVP5150APBS、视频编码器SAA7104、同步动态存储器SDRAM以及控制部分的通信器件UART等组成,如图2所示。
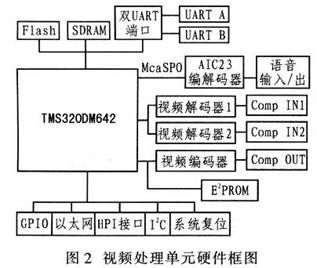
DM642首先启动视频解码器TVP5150APBS,捕获并解码CCD摄像头的每一帧视频信号,然后读取并存储在SRDRAM中,然后处理所存储的数据并提取信标光坐标,通过UART将相应信息实时反馈给控制部分,同时输出处理的数据,经视频编码器SAA7104编码,经VPout端口输出显示。
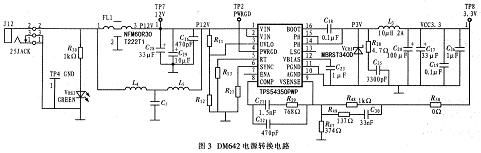
由于DM642功能强大,其应用电路涉及到大量外围电路,因此整个图像处理电路VCM相当复杂,限于篇幅原因,这里只给出电源部分电路,以供参考。VCM采用12 V直流电源供电,经DC/DC转换器TPS54350PWP转换成3.3V直流电压作为DM642的电源,由于DM642工作在600 MHz的高频率下,因此对电源稳定性要求极高,其电路如图3所示。
3 系统软件设计
当CCD采集的视频信号通过DM642的视频输入端口进入视频处理单元模块,若发现信标光不在视场中,则执行光栅螺旋扫描算法,直到信标光进入视场,此时图像处理模块将提取出信标光光斑的坐标通过串口发送给电机控制模块,电机控制模块根据接收的信标光坐标信息对二轴电控转动平台执行基于增量式PID跟踪算法控制,该过程不断反复,直到信标光光斑始终保持在视场的中心位置,则建立通信链路,从而实现通信;另外,若信标光一开始就位于视场,则直接进入跟踪过程,且整个扫描和跟踪过程是相互嵌套的。跟踪过程中一旦目标突然从视场中丢失,则系统则转去执行扫描过
TMS320DM642 移动平台 ATP技术 空间光通信 相关文章:
- 基于TMS320DM642的农药喷洒系统(04-22)
- 基于DSP的视频采集驱动程序的实现(07-21)
- DSP并行处理在剖面声纳系统(06-07)
- 基于TMS320DM642的CCD图像采集系统设计(11-14)
- 双DSP的多路视频监控系统设计(02-14)
- 基于FPGA+DSP技术的Bayer格式图像处理(01-13)