基于DSP的金刚石压机智能控制系统电路设计
控制参数能快速跟踪调整,所以采用比例控制;当偏差减小到阈值以下时,切换转入模糊控制,提高系统的阻尼性能,减小超调量。这样,就综合了比例控制和模糊控制的优点。该方法中模糊控制的论域仅是整个论域的一部分,相当于模糊控制的论域被压缩,相当于语言变量的语言值增加,提高了灵敏度和控制精度。在误差语言变量的语言值为零时切换至PI控制,当绝对误差为零或积分饱和时,将积分器关闭。
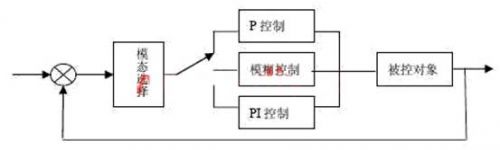
图2压力控制策略
3.2 功率控制
人造金刚石生产工艺要求加热控制是在超压达到30MPa以后开始的,加热控制也分加温、保温几段进行,几分钟或十几分钟后停止加热。该系统中,通过控制金刚石的加热电压来控制加热功率,实践中,这也是一种很好的控制方法。为了精确控制加热功率和温度,加热功率采用基于模式识别的专家智能自整定PID控制算法,如图5所示。在输出和给定存在偏差或系统受到扰动时对系统误差e的时间特性进行模式识别,分别识别出该过程响应曲线的多个特性参数,如超调量、阻尼比、衰减振荡周期、上升时间。所测出的各特性参数值与实现设定好的特性参数值进行比较,其偏差量送入专家系统,专家系统在线推断出为消除各特征量的偏差,控制器参数所应有的校正量Δkp、Δki、Δkd,将它们送入常规的PID控制器,以修正控制器各参数,输出控制信号控制被控对象加热电压,使加热电压响应曲线的特征参数满足工艺要求。设计专家式自整定控制器的核心是:在系统闭环运行时,合理选定描述系统暂态误差特性的各个特征参数,获取特定参数的偏差量与PID控制器参数的校正量Δkp、Δki、Δkd之间的关系。被控对象特征撮弄数的选择方法是先测试被控对象的阶跃响应,再用Cohn-Coon公式计算出特征参数K、Tp、τ。
K=Δy/ΔR=(y2-y1)/(R2-R1); Tp=1.5(t0.632-t0.28); τ=1.5(t0.8-t0.632/3)
式中:Δy为系统输出响应;ΔR为系统阶跃响应;t0.28为系统输出响应曲线中对应0.28Δy时的时间;t0.632为系统输出响应曲线中对应0.632Δy时的时间。
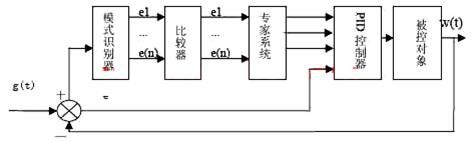
图3 加热功率控制策略
4.系统的软件设计
4.1 系统主程序
系统软件主程序流程见图6,采用模块化结构。软件采用C和汇编混合编程,在TI的DSP Code Composer下编译和调试。在控制程序中将采样后的采样值与设定值相比,得出误差和误差变化率,再根据制定好的控制规则来控制电磁阀和晶闸管的通断,从而保证压机能按照设定的时序要求运行。
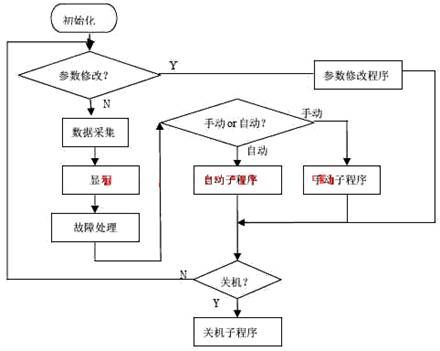
图4主程序流程
4.2 中断程序
该系统实际为实现3个信号的闭环实时控制,考虑到实时性,所用中断较多。主要有过零检测中断、定时中断、采样中断、键盘中断。定时器2、4 中断程序负责时间控制以便进行相应的压力、电压时序控制步骤,定时器1、3中断程序控制两个可控硅的控制角大小。电压过零检测中断程序确定与电压同步以便触发,键盘中断控制中断键的响应。其中,在工频为50Hz,周期T为20ms的条件下,电压过零检测中断每10ms发生一次。选用的双向晶闸管需在每半个周期内触发一次。控制角α和触发时刻Tθ之间的关系为: 由于需要对导通角的精确控制,过零检测中断需要及时得到执行,故该中断优先级为最高。
由于需要对导通角的精确控制,过零检测中断需要及时得到执行,故该中断优先级为最高。
4.3 数据采集和闭环控制
在每次信号采样时,为消除随机误差,数据采用平均滤波法,其滤波公式为  采样次数N越大,X越接近真值。实际应用中,为了提高实时控制速度,采用去极值平均滤波法。在此,即为连续采样8次,去掉一个最大值和最小值,再求余下6个采样值的平均值。
采样次数N越大,X越接近真值。实际应用中,为了提高实时控制速度,采用去极值平均滤波法。在此,即为连续采样8次,去掉一个最大值和最小值,再求余下6个采样值的平均值。
根据金刚石的生成工艺要求,压力和电压需保持为设定的阶梯状变化。在上升阶段为加压和加热阶段,此时只需开启交流泵和两个加热接触器即可。在水平阶段为保压和保温阶段,此时需根据采样时刻相应的偏差值和偏差变化率,根据相应的控制策略来控制。
5.结语
该控制系统具有较好的工业意义,它较PLC的金刚石压机控制器便宜,市场前景更大。同时,DSP(TMX320LF2407)内有CAN总线,便于系统升级,可通过CAN总线将多台压机与上位机构成一网络,便于控制管理。
本文作者创新点:1.鉴于目前市场上压机控制多为PLC、单片机,在此提出以DSP为控制核心,它具有运行速度快,价格优惠的特点. 2.且实际中大多采用PID控制压机的温度和压力,在此分别再用模糊控制和专家控制来改进,有较好的鲁棒性能。
导师点评:本文提出了一种金刚石压机的新型控制方案--基于DSP(TMS320LF2407)的嵌入式控制系统,并介绍了该控制系统的软硬件设计。在算法上,根据工艺要求采用智能PID控制和模糊PID控制策略代替传统的PID控
- 在采用FPGA设计DSP系统中仿真的重要性 (06-21)
- 基于 DSP Builder的FIR滤波器的设计与实现(06-21)
- 达芬奇数字媒体片上系统的架构和Linux启动过程(06-02)
- FPGA的DSP性能揭秘(06-16)
- 用CPLD实现DSP与PLX9054之间的连接(07-23)
- DSP+FPGA结构在雷达模拟系统中的应用(01-02)