基于MSP430的温度控制系统的设计与实现
5 TEC1-12708驱动电路
制冷片TEC1-12708:依据帕尔帖效应制作的温差电制冷组件重量轻、体积小并具有相对高的制冷量,特别适用于有限空间的制冷,由于制冷组件是一种固态热泵,因而它无需维护,无嗓音,能在任何位置工作,抗冲击和抗震动能力强。另外,改变组件工作电流机型时,又可以制热,改变电流强度可调整制冷功率。
由于TEC要求的驱动电流是双向的,所以选择功率管MOSFET,结合双向可控硅光电耦合器组成H桥式电路控制TEC方向。功率MOSFET管IRF 540的导通电阻很小,能有效提高供给负载的最大功率。光电耦合器是一种电-光-电转换器件,把发光源和受光器用透明绝缘体隔离,不会对电路造成任何损害,比继电器性能好。
图3为双向可控硅光电耦合器构成4个由高电平控制的开关电路。用该4个开关电路连接成H桥电路,以实现对制冷片加热与降温。当开关1.3关闭时,电流正向流经制冷器件,制冷器开始加热;当开关2,4关闭时候,电流反向流经制冷器件,制冷器件降温。
经过对控制原理进行透析,绘制该制冷片的总控制原理图如图4所示。通过控制PWM波的占空比来控制功率管IRF540的导通时间,从而控制电路提供给制冷片的有效电流及方向。控制效果良好。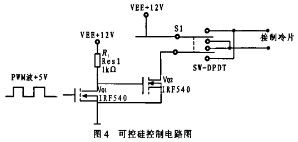
6 系统软件设计
该系统软件完成制冷制热、设置温度值、自动调温等功能。重要算法实现包括PID算法和数字温度传感器DS18B20的控制。整体过程为:系统初始化,等待按健中断。选择制冷或制热后,设定指定温度值;将温度采集的数据接收进来,与设定温度值比较,将差值经过PID算法后计算出进行功率控制的占空比,从而调节温度。其中,PWM波由MSP430F449的定时器B产生,在该模式下,寄存器CCR0用于控制PWM波频率,其他任意一个寄存器控制占空比,控制灵活,相当方便。控制积分调节参数对,对其采取分段积分PID算法,控制系统超调量。软件流程如图5所示。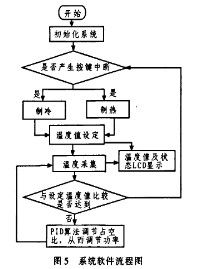
该系统软件完成制冷制热、设置温度值、自动调温等功能。重要算法实现包括PID算法和数字温度传感器DS18B20的控制。整体过程为:系统初始化,等待按键中断。选择制冷或制热后,设定指定温度值;将温度采集的数据接收进来,与设定温度值比较,将差值经过PID算法后计算出进行功率控制的占空比,从而调节温度。其中,PWM波由MSP430F449的定时器B产生,在该模式下,寄存器CCR0用于控制PWM波频率,其他任意一个寄存器控制占空比,控制灵活。
7 测试结果
7. 1 测试过程
为防止室温变化对测试造成影响,选择有空调室温恒定的地方进行测试。在室温16℃下,测试数据如表2所示。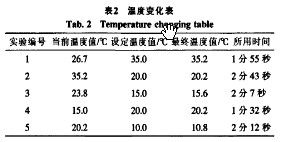
7.2 测试结果分析
由上实验数据可以看出,温度读数可以达到0.1℃,设定的温度值与最终温度值读数相差最大为0.8℃,完全满足实验要求±2℃范围的要求。从实验数据第2组可以看出温差大于15℃时,达到指定度所需时间为2分43秒。
- μC/OS-Ⅱ在MSP430F149上的移植(03-01)
- MSP430与I2C总线接口技术的研究(06-14)
- 基于MSP430单片机的超声波倒车雷达监测报警系统设计(08-14)
- 2010年中国(成都)电子展胜利闭幕(08-15)
- 基于MSP430单片机的电子汽车限速器的研究(08-20)
- 基于MSP430的微功耗数据采集系统的开发应用(10-16)