基于MSP430单片机的超声波倒车雷达监测报警系统设计
时间:08-14
来源:
点击:
一致的2.5V经过汽车电瓶电压12V经过GM6639降压得到。
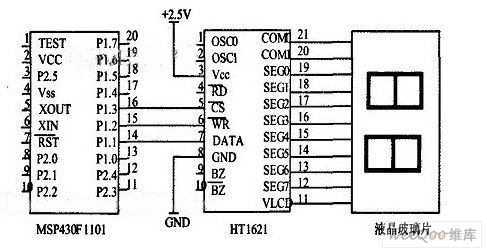
图4 HTl621与单片机接线图
1将 图4 HTl621与单片机接线图
由于HTl621芯片提供了两种音频输出BZ和BZ(有效),在两个音频输出并接在一个或门电路上由程序控制在不同的距离范围内选通不同的音频输出,这样可根据不同的距离发出不同的报警提示。
2.5系统主程序设计
超卢波倒车雷达监测报警系统测距系统软件主要完成三个任务:
(1)Timer-A发送定时40ms的脉冲波,并在每一个脉冲发射的同时启动计数器,给比较单元CCRO赋初值;
(2)当有外部中断时,进入中断服务予程序,如果此中断到来之前计数器无溢出,则停止计算,进入数据处理单元。如果中断到来前计数器有溢出则进入出错管理,屏蔽一个中断源,累计测量次数自加一;
(3)用单片机控制液晶驱动HT162l,计算得到的距离值,通过串行传输方式送给显示芯片,并比较其大小,当距离在小于0.5m时选通BZ(4knz音频输出)离小于2m时选通BZ(2kHz音频输出)。
3总结
系统利用超声波在空气中的可传播性,在将时间和速度相乘即得距离的原理,设计了一个基于MSP430的超声波倒车雷达监测报警系统,用于实时测得汽车尾部与障碍物的距离,通过LCD显示距离值,将距离值提供给司机,该系统最大测量距离是6.5m,精确度是I5cm,它具有成本低、非接触、速度快、精度高、可靠性强、适应性好、操作方便,有着广泛的应用前景。
- 基于ATmega8的超声波倒车雷达实现方案(12-12)
- 基于MSP430单片机的倒车雷达设计(08-24)
- 基于单片机的倒车雷达设计(07-30)
- 基于单片机的倒车雷达的设计(06-04)
- 基于MSP430的倒车雷达的设计(04-21)
- 基于单片机的倒车雷达设计(12-23)