基于DSP2407的多功能电源控制系统设计
时间:09-08
来源:作者:总装备部汽车试验场 蓝毅君 仓艳 苏晓亮
点击:
④ 数据采集电路
多功能电源要实现三种输出特性,即恒压、恒流、脉冲,需要进行恒值控制,因而必须设计精度高、采样速度快的恒值反馈采样电路。由于线性霍尔传感器体积小、外围电路简单、频带宽、动态特性好、寿命长,并具有电磁隔离的功能而被广泛应用于逆变电路中。
数据采集电路采用CHB-500S型霍尔电流传感器对电流采样,其额定电流为500A,输出电流100mA,响应时间小于1μs,采用±15V供电。电压采样采用的是CHV-25P型霍尔电压传感器,其最大量程为500V,输出电流25mA,线性度为0.2%,亦采用±15V供电。霍尔电流传感器输出的微小电流信号首先经过I/V电路转换成电压信号,然后经运算放大器放大缓冲后送入DSP芯片中进行A/D转换。
数据采集电路是DSP微处理器的前向通道,较易受到干扰,因此,在模拟输入端加上RC阻容电路,可以起到低通滤波的作用,减轻噪音的影响。
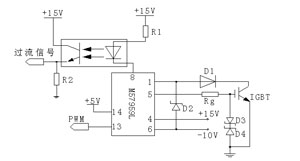
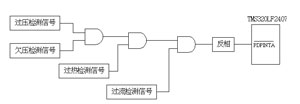
⑤ 保护电路
TMS320LF2407提供了PDPINTA输入信号,可保证系统中功率转换电路及逆变电路的安全可靠工作。保护电路结构框图如图6所示。过压/欠压检测信号、过流检测信号、过热检测信号经或门综合后,经过反相输入到PDPINTA引脚。若有故障时,或门输出为高电平,该引脚相应为低电平, DSP的PWM输出管脚全部成高阻状态,PWM输出被封锁。整个过程可由硬件实现。
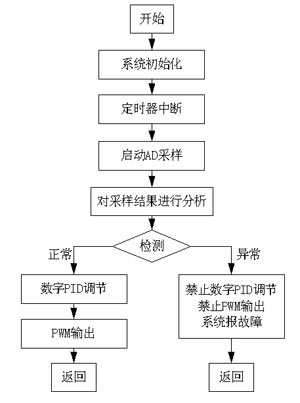
控制系统的软件设计
控制系统的软件主要包括系统初始化程序、ADC采样程序、PWM波生成程序、PID控制算法程序等。软件总体设计流程如图7所示。
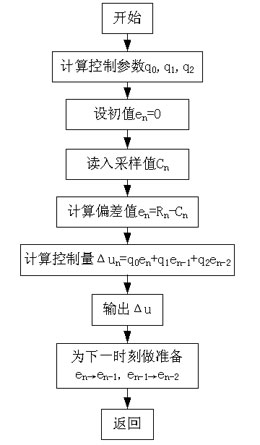
该系统软件设计采用增量式PID控制算法,根据采样时刻的偏差值计算控制量。采样电路将电压电流信号采集滤波后输入到DSP,经与输入值相比较后进行数字PID运算,从而实现对输出控制量的调节。增量式PID控制算法流程如图8所示。
- 基于DSP的中频电源测试系统设计(08-08)
- 基于DSP2407的中频电源测试系统的设计(03-31)
- 基于DSP数字多功能板的实现(09-08)
- 基于DSP2407的多功能电源控制系统设计方案(04-21)
- 基于DSP的新型多功能电能质量监测仪表(05-01)
- 基于STC12C5A60S2的多功能测量系统设计(01-30)