嵌入式Win CE中CAN总线控制器的驱动设计与实现
AN_Read函数的设计实现
根据CAN协议规范,报文的接收由CAN控制器SJAl000独立完成,收到的报文放在接收缓冲器。可以发送给主控制器的报文由状态寄存器的接收缓冲器状态标志"RBS'’和接收中断标志"RI"标出(如果使能)。主控制器会将这条信息发送到本地的报文存储器,然后释放接收缓冲器并对报文操作。发送过程能被SJAl000的中断请求或查询SJAl000的控制段状态标志来控制。cAN_Read函数操作成功则返回实际读取的字节数,否则返回值为-1。CAN_Read函数程序的流程图如图3所示。 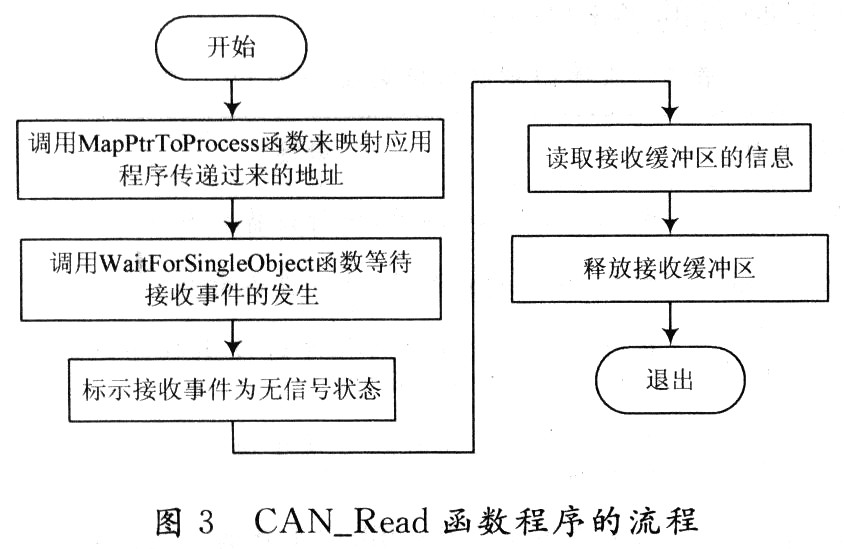
在SJAl000控制器中,报文的发送和接收是采用中断方式来完成的。内核函数InterruptInitialize()外部中断事件和将逻辑中断号绑定,这一步就会使能该中断。当该中断发生时,ISR就触发该事件生效。完成以上工作后,驱动程序中的IST就可以使用WaitForsin-gleObject()函数等待中断的发生。中断处理结束后,IST需要调用InterruptDone()告诉操作系统中断处理结束。中断服务线程CAN_IntrThread函数程序流程图如图4所示。 
4 驱动程序的封装及加载
通过上面的工作,能够编译得到一个DLL函数,但它的接口函数还没有导出,还需要告诉链接程序需要输出什么样的函数。为此,必须建立一个def文件,使用WindoWS下自带的记事本程序编辑一个文件名为"Can.def"的文件: 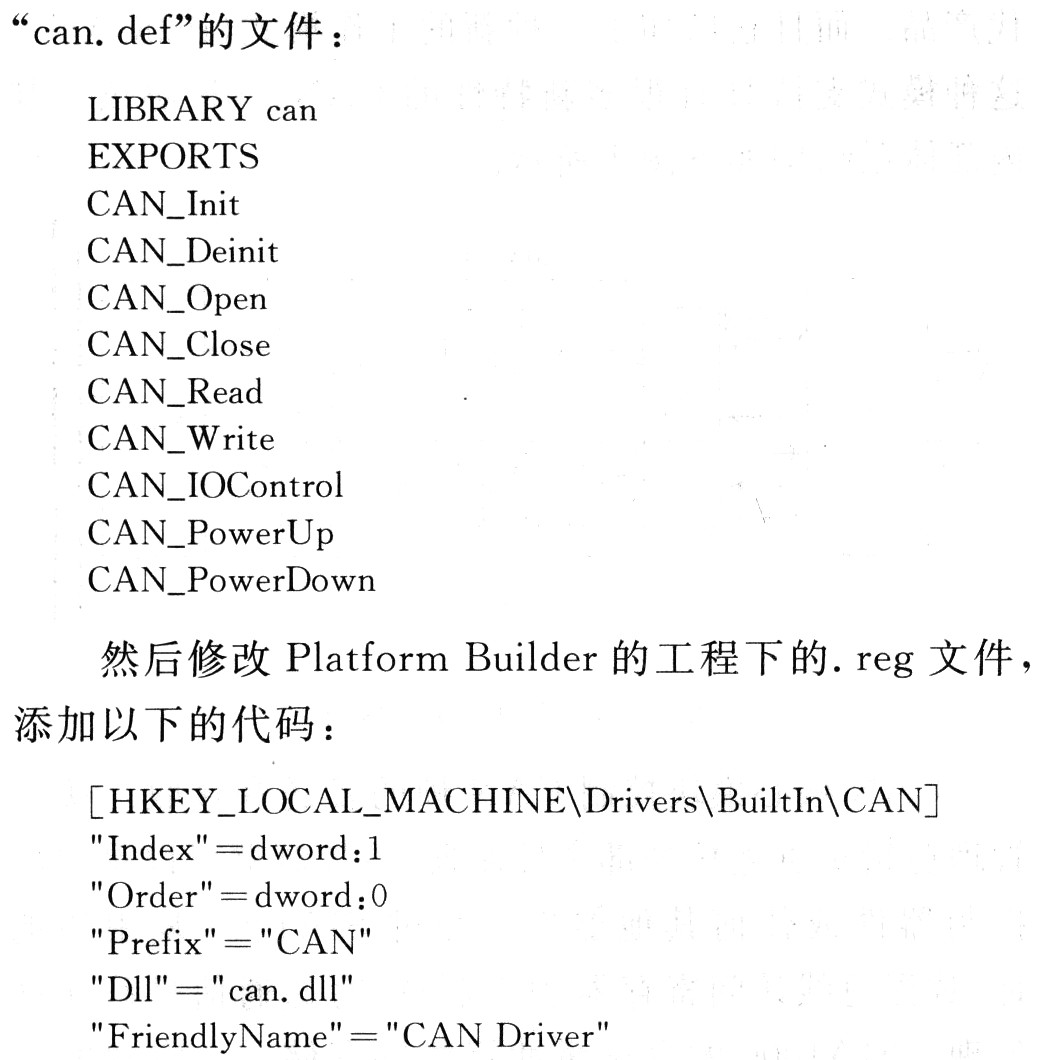
S3C2410 嵌入式 win CE CAN总线控制器 ARM9 相关文章:
- 基于s3c2410的CramFS根文件系统的移植(07-13)
- AD7888与S3C2410的SPI接口及Linux下嵌入式驱动的实现(11-06)
- 基于WinCE的ARM视频监控系统(11-14)
- 基于WinCE的I2C驱动程序设计(04-24)
- WinCE下光电编码器的驱动程序设计(04-12)
- 基于S3C2410A的嵌入式系统的U-Boot移植(01-24)