����DSP�����͵��ؿ��Ƽ����
2 ����ϵͳ���巽�����ԭ������˼·
��ͼ1�Ľӿ���ɿɿ�����Ϣ���ݵ����ӿ������һ���� Ҫ�Ļ��ڣ������������ֱ��Ӱ��ϵͳ�����ܡ�Ϊ�˼��������ĸ������ⲿ�������ź� ���жϷ�ʽ���룬�ź��������ʱҪ���ǿ������ԡ�����Ƶ����巽��Ҫ����ʵ�֣��Բ�ͬ �ͺŵĵ���Ҫ��һ������Ӧ�ԣ�����Ҫ��������ͺţ�Ӧ�����Ŀ�������Ϊ�������ٸĶ��Ķ�Ӳ�����Ϊ�á���ЩҪ��Ҫ�ڷ�����Ƶĸ��������п��ǡ�
3 ���ؿ��Ƽ��������Χ�Ľӿ����
���ؿ��Ƽ��������Χ�ĵ�Ԫ�������ݽ���ʱ����������Ӧ���������� ��ʽ����Ϣ�� ���ͳ����ɵ��ؿ��Ƽ�������������ת��Ϊ���ݣ����������Ӵ��˵��ؿ��Ƽ�����ĸ��������ҹ���������Ӧ��ģ��ת������Ҳ�����ˡ��ο������������ǰ���� �������������ǵ���������װ�û���������ж������˼������Ƭ����Ϊ�˼��ؿ��Ƽ��������Χ��Ԫ�������ݵĽӿڵ�·�����ٸ����ʩ���ɲ���RS-485��RS-232��RS-422 ͨѶЭ�顣Ϊ�˼��ٵ��ؿ��Ƽ��������Χ��Ԫ����ͨѶ��ʱ�俪����ͬʱҲΪ�˼��ٽӿ���������Ŀ���������ϵͳ�Ŀɿ��ԣ�ѡ��UARTͨѶ�ӿ�оƬ����ʵ���첽����ͨ Ѷ�����ݲ����жϷ�ʽ������Ƽ����������DSP��I/O��Դ���ޣ���Ҫ���ƴ����ⲿ�ӿ��ߣ�����չI/Oʱ����ֱ�ӽ���UART����������16C550��16C554��������MODEM�� �ţ���ʡȥ����չI/O�����IJ��ɿ����ء�
�����ŷ��������õ���4�������������Ҫ����4�����ͬʱ�������֮�䲻�����ӳ١� ���ڽṹ�ϵ����ƣ�����Ŀ������뵯�ؿ��Ƽ������һ���ľ��룬Ϊ�˿����ź����ϵͳ�ɿ��ԣ���Ȼ��Ҫ����ͨѶ��Ϊ�˱�֤���ƾ��ȣ�������ŷ�������һ�����12λ����ߵ� D/A�õ�����ָ�������ǵ�ͨѶ��������������Ĺ�����ʽ�Ϳ��Ƶ�ʵʱ��Ҫ�������㾫�ȵ�ǰ���£�ѡ��12λ��D/A�任�ȽϺ��ʣ���ѡ��MAX536����ͨѶ�����ݸ�ʽ��ͼ2 ��
��ͼ2��֪����1���ֵ�ͨѶ�����У�����12λ��D/A�����⣬�������ø�4λ��ַ/�� ��λ�� ��ͬ�����ʵ��"���������ͬʱ���"���ﵽͬʱ����4�������Ŀ�ġ�������ѡ�����ʵ�ֺ�C31���������ӡ� 
4 DSP��ѡ��
DSP��ѡ��Ҫ�ӿ�������Ҫ�ӿڡ������ٶȡ����㾫�ȡ������ı� �ƺ���������ֲ�Եȷ��濼�ǡ��ο�ͼ1������ͨѶ�ӿڲ�����UART��������ʹ��ԭ���ȽϷ�ʱ��ͨѶ��ʱ���٣��������Բ����ǣ�����DSP�����ٶȵ�ѡ����ɿ��Ʒ����п��Ʒ��̼������Ĵ� С���������ڰڶ�Ƶ�ʲ�����10 Hz��С�͵���������2 ms�������ڣ�ѡ��50 MHz�����DSP �� �����������ǵ���̵ķ���ͳ������ֲ�ԣ�ѡ�ø����DSP�ȽϺ��ʣ��ټ��� ������Ӳ����Դ����ѡ����TMS320C31-50��ѡ�����������ģʽ������ҪӲ����Դ���ڱ� 1������ģ����ͼ3��ʾ���������������Կ���ѡ��TMS320C4X ��TMS320C6Xϵ�С� 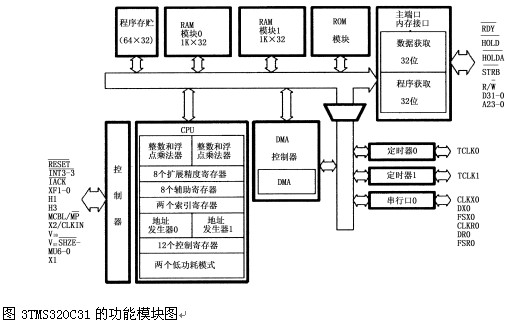

����/�������� STRB: 32λ���ݣ�24λ��ַ
�ڲ�RAM 2K��, RAM0 1K; RAM1 1K
����I/O�� 1�����ٴ��п�
DMA������ ��ͨ��
��ʱ�� ������32λ
�ⲿ�ж�Դ 4����INT0��INT3
�������ӿ� 1��
�����ź� ������XF0,XF1
���� ���֡���λ���ź�
5 �����������
Ϊ�˽������ⲿ���ݵĽ�������ҪƬѡ�������ߡ���ַ�ߵ�ʱ ���źŰ��չ涨������ϵ�� ������ϵͳҪ�������ƹ�ϵ��Э���£������γɹ���ʱ��ϵͳ�����������������������ƹ�ϵһ������ŵ�·�����굥Ԫʵ�֡�Ϊ��ʵ��4.2�е�ͨ���ԣ�ͬʱҲ��Ϊ�˼��� Ӳ������Ŀ�����ϵͳ�Ŀɿ��ԣ�ѡ�������굥Ԫ��ͨ����ϵͳ������������ź���Ŀ�ķ���������Ӳ��ʱ�����������źţ�ѡ����Lattice��˾���������� �̵�Ԫisp1610E����������ϵ����д�������Ʒ��̣���ר�õ���download����ʵ�������ơ����Թ��̿ɲο�Ӳ����������ͼ��
6 RAM��ROM��ѡ��
TMS320C31��DSP���øĽ��Ĺ���ṹ�����������ͳһ��ţ���� �����������Ĵ�С���� ��2 K��32λ������Է���DSP�ڲ�RAM���У�������չ���������û�����һ�㶼�ᳬ��2 K�� �� Ҫ���ճ���Ĵ�С��չ32λ��RAM����ѡ��RAM���ٶȱ���С��DSP�Ķ�д���ڡ�TMS320C31-5 0ȫ������ʱ�Ķ�д����Ϊ20 ns����ˣ�ѡ����4Ƭ15 ns��128 K��8λRAM�����ϵͳ��RAM �� ��DSP�����������ģʽʱ������Ҫ�����EEPROM��FLASH�У���ϵͳ�ϵ�ʱ����Bootlood ������Ƶ��ⲿ��RAM�����С�ѡ��ROMʱ��ͬ����Ҫ�����������ٶȣ�����DSP���������7 �����ڵ��ӳ٣���ˣ�ROM���ٶ��������ó��������ơ�����Ҫ���ڳ���Ĵ�С��
������ԭ��ѡ��û���������������������ַ���ߡ��������ߺ���ʱ���Ҫ�������� �Ʋ�ʵ�ֵ��ؿ��Ƽ������ 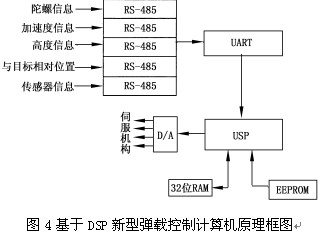
����DSP�����͵��ؿ��Ƽ������ʵ�ֺ͵���
1 Ӳ�������͵���
�ڷ�����ƵĻ����ϣ���ϵ������Ƶ�����ѡ����ʵ�DSP�ͽӿ������� �����˻���DSP�ĵ������Ϳ��Ƽ������ͼ4Ϊ���ݾ�����������Ƶ�Ӳ��ԭ����ͼ��
2 ������ƺ͵���
Ϊ��ʵ��������ģ�黯��ƣ�Ӧ�Ծ�����ѧ������֤�Ŀ����㷨�� �з��������չ��ܽ��� ģ�黮�֣��γ�һ�����Ĺ���ģ�顣���չ������̺Ϳ��ƹ��ɣ���һ�����Ĺ���ģ���������������Ϊ�˷����Ӳ�����������������ʱ���Կ��ǻ�����Ա�̣���Ӳ���ӿڿ��ƶ�ĵط���ѡ�û�����ԣ����㷨���ӡ���������ģ��ɲ���C���ԡ� ����������ͼ��ͼ5��ʾ�� 
3 Ӳ������������
��
������Ӳ�����Էֱ�ͨ���Ϳɽ���������Ӳ�������������÷������� ���ݿ����㷨����д�Ŀ����������ص�Ӳ����DSP�У���������Ŀ��ƽ���Ƿ���ȷ��ȷ�ϵõ���ȷ�Ľ����������¼��EEPROM�洢���У�������������е������顣����������ȷ������ ������������ǰһ�����µ��ԣ�һ�п��� �������˾������������ơ�Ӳ�������͵��ԡ�������ƺ͵��ԡ���Ӳ����ϵͳ�������γ��˻���DSP�����͵��ؿ��Ƽ������
������
���ż����IJ��Ϸ�չ��DSP���������е���Խ�����ھ��º߿Ƽ� �еõ��㷺��Ӧ�á������Ը߾��Ⱥ�С�ͻ��ĵ������п���Ϊ������ϸ��˵���˻���DSP�����͵��ؿ��Ƽ���������ƣ���ͨ���˵�������ܲ��ԡ������ϵ�֮ǰ�����辭�����������Ͳ��ԣ�������� ���¶�ѭ�����ϻ�����ȣ���ͬʱҪ�����Ĺ��̻��������ܹ������������ͺźͺ���������еõ����㷺��Ӧ�á�
DSP ���ؿ��� ����� ����ϵͳ ������£�
- �ڲ���FPGA���DSPϵͳ�з������Ҫ�� (06-21)
- ���� DSP Builder��FIR�˲����������ʵ��(06-21)
- ���������ý��Ƭ��ϵͳ�ļܹ���Linux��������(06-02)
- FPGA��DSP���ܽ���(06-16)
- ��CPLDʵ��DSP��PLX9054֮�������(07-23)
- DSP+FPGA�ṹ���״�ģ��ϵͳ�е�Ӧ��(01-02)