基于80C51单片机的智能小车设计
摘要:采用80C51单片机为控制核心,利用超声波传感器检测道路上的障碍。控制电动小汽车的自动避障,快、慢速行驶,以及自动停车,并可以自动记录时间、里程和速度,自动寻迹和寻光功能。整个系统的电路结构简单。可靠性能高。
关键词:80C51单片机;光电检测器;PWM调速;智能小车
O 引言
在现有玩具电动车的基础上,加装光电检测器,实现对电动小汽车的速度、位置、运行状况的实时测量,并将测量数据传送至单片机进行处理,然后由单片机根据所检测的各种数据实现对电动车的智能控制。
1 直流调速系统采用PWM调速
直流调速系统采用晶闸管的直流斩波器与整流电路。晶闸管不受相位控制,而是工作在开关状态。当晶闸管被触发导通时,电源电压加到电动机上,当晶闸管关断时,直流电源与电动机断开,电动机经二极管续流,两端电压接近于零。脉冲宽度调制(Pulse Width Modulat-ion),简称PWM。脉冲周期不变。只改变晶闸管的导通时间,即通过改变脉冲宽度来进行直流调速。
脉宽调速也可通过单片机控制继电器的闭合来实现,但是驱动能力有限。为展利实现电动小汽车的左转和右转,本设计采用了可逆PWM变换器。可逆PWM变换器主电路的结构式有H型、T型等类型。我们在设计中采用了常用的双极式H型变换器,它是由4个三极电力晶体管和4个续流二极管组成的桥式电路。图1为双极式H型可逆PWM变换器的电路原理图。
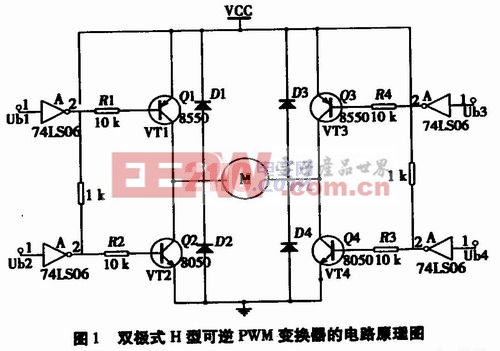
4个电力晶体管的基极驱动电压分为两组。VT1和VT4同时导通和关断,其驱动电路中Ub1=Ub4;VT2和VT3同时动作,其驱动电压Ub2=Ub3=-Ub1。
2 检测系统
检测系统主要实现光电检测,即利用各种传感器对电动车的避障、位置、行车状态进行测量。
2.1 行车起始、终点及光线检测
系统采用反射式红外线光电传感器用于检测路面的起始、终点(2 cm宽的黑线),玩具车底盘上沿黑线放置一套,以适应起始的记数开始和终点停车的需要。利用超声波传感器检测障碍。光线跟踪,采用光敏三极管接收灯泡发出的光线,当感受到光线照射时,其c-e间的阻值下降,检测电路输出高电平,经LM393电压比较器和74LSl4施密特触发器整形后送单片机控制。
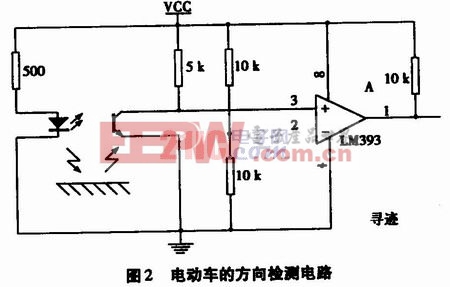
本系统共设计两个光电三极管,分别放置在电动车车头的左、右两个方向,用来控制电动车的行走方向,当左侧光电管受到光照时,单片机控制转向电机向左转;当右侧光电管受到光照时,单片机控制转向电机向右转;当左、右两侧光电管都受到光照时,单片机控制直行。见图2电动车的方向检测电路。
2.2 行车方向检测电路
采用反射接收原理配置了一对红外线发射、接收传感器。该电路包括—个红外发光二极管、一个红外光敏三极管及其上拉电阻。红外发光二极管发射一定强度的红外线照射物体,红外光敏三极管在接收到反射回来的红外线后导通,发出一个电平跳变信号。
此套红外光电传感器固定在底盘前沿,贴近地面。正常行驶时,发射管发射红外光照射地面,光线经白纸反射后被接收管接收,输出高电平信号;电动车经过黑线时,发射端发射的光线被黑线吸收,接收端接收不到反射光线,传感器输出低电平信号后送80C51单片机处理,判断执行哪一种预先编制的程序来控制玩具车的行驶状态。前进时,驱动轮直流电机正转,进入减速区时,由单片机控制进行PWM变频调速,通过软件改变脉冲调宽波形的占空比,实现调速。最后经反接制动实现停车。
2.3 前行与到车控制
前行与倒车控制电路的核心是桥式电路和继电器。电桥上设置有两组开关,一组常闭,另一组常开;电桥一端接电源,另一端接了—个三极管。三极管导通时,电桥通过三极管接地,电机电枢中有电流通过;三极管截止时,电桥浮空。电机电枢中没有电流通过。系统通过电桥的输出端为转向电机供电。通过对继电器开闭的控制即可控制电机的开断和转速方向进而达到控制玩具车前行与倒车的目的,实现随动控制系统的纠偏功能。图3为前行与倒车控制电路。

2.4 行车距离检测
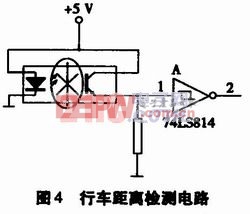
由于红外检测具有反应速度快、定位精度高,可靠性强以及可见光传感器所不能比拟的优点,故采用红外光电码盘测速方案。图4为行车距离检测电路。
3 显示电路
本设计中用两片4位八段数码管gem4561ae作显示器,采用新型芯片EM78P458作为显示驱动器,用单片机的并行口控制,一个数码显示电路用4个口线,用专用驱动芯片控制可以减少对CPU的利用时问,单片机将有更多的时间去完成其他功能。
4 电源的设计
本设计的电源为车载电源。为保证电源工作可靠,单片机系统与动力伺服系统的电源采用了大功率、大容量的蓄电池,而传感器的工作电源则采用了小巧轻便的干电池。
5 系统原理图
智能电动车采用80C51单片机进行智能控制。开始由手动启动小车,并复位,当经过规定的起始黑线,由超声波传感器和红外光电传感器检测,通过单片机控制小车开始记数显示并避障、调速;系统的自动避障功能通过超声波传感器正前方检测和红外光电传感器左右侧检测,由单片机控制实现;在电动车行驶过程中,采用双极式H型PWM脉宽调制技术,以提高系统的静动态性能;采用动态共阴显示行驶时间和里程。系统原理图如图5所示。
- 支持网络传感器的嵌入式操作系统设计(11-10)
- 一种基于DSP的张力、深度、速度测量系统(04-15)
- 基于TMS320F2812的DSP控制器设计及应用(04-15)
- 基于DSP的数字式MEMS加速度传感器的设计与应用(04-17)
- 基于ADSP-BF533的家庭安全系统设计(03-26)
- 基于MSP430单片机的电子汽车限速器的研究(08-20)