基于路径识别的智能车系统设计
时间:06-08
来源:互联网
点击:
平高出OUT1越多,电机有反转趋势。反之,当需要智能车加速时,PI控制器计算值为正,PWM3输出的PWM信号占空比为零,PWM5输出的PWM信号占空比与计算值的绝对值相同,计算值越大,OUT1的电平高出OUT2越多,电机有正转趋势。
2软件设计
本系统的控制方案是根据路径识别模块和车速检测模块所获得的当前路径和车速信息,控制舵机和直流驱动电机动作,从而调整智能车的行驶方向和速度。图7为系统程序流程图。

智能模型车的路径搜索算法(LineSearchingAlgorithm)是智能车设计中的关键部分。本系统路径搜索算法采用简单的switch语句,根据检测到黑线的光电管的位置判断舵机的偏转角度,同时给出相应的速度控制信号。其程序流程图如图8所示。

3实验验证
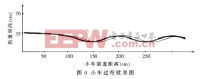
智能车路径识别的关键在于快速地判断弯道并快速、准确地响应。智能车行进过程中,从长直道进入连续弯道时,由于曲率变化很小,此时转速的设定值较大,加之舵机响应时间的限制,智能车极易脱离轨迹。采用加长转臂的舵机及合理的路径搜索算法,可以增强智能车对轨迹的跟随性能。图9所示为智能车寻迹连续弯道试验效果图。其中,粗线为所寻迹的黑线,细线为智能车实际运行轨迹。
本文设计了一个智能车控制系统,实现了快速自动寻迹功能。在硬件上,该系统采用MC9S12DG128B单片机为控制核心,协调电源模块、路径识别模块、车速检测模块、舵机控制模块及直流驱动电机控制模块的工作;在控制算法上,采用路径搜索算法和类PI控制算法实现对智能车的舵机转角和电机转速的控制。此外,系统还完成了对加长转臂舵机的控制,实现了转向伺服电机与车速的配合控制。实验结果表明,该智能车系统响应快,动态性能良好,整体控制性能良好。
- 基于MC9S12XS128的单片机开发板的设计(08-13)
- 基于MSP430的智能小车自动纠偏与避撞的实现(06-06)
- 基于Android和蓝牙技术的手机遥控车设计(10-13)
- 智能车速度控制pid(电机闭环控制算法)(12-02)
- 神经网络用于智能车控制的一点心得(11-25)
- 基于HC9SDGl28单片机的智能车的设计(02-17)