动态调度算法(DSA)
动态调度算法(DSA)包括2 个方面:动态调度协议(DSP)和利用非实时间隔重发控制数据。
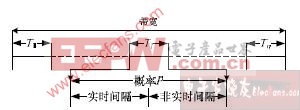
图1 是该算法的带宽分配模型,即把带宽分成N 个与T1相等的最小间隙,访问每个间隙的概率为P,每个间隙又分成实时间隔和非实时间隔,用实时间隔发送控制数据,用非实时间隔发送非实时数据,事件数据可以在任何间隔内发送。
2.1 DSP 协议
该协议动态地选择间隙传输请求或重传失败请求,这里提出2 个不同的间隙选择机制。
(1)均衡间隙选择。实时数据和非实时数据以概率P 试图在N 个间隙的开始进行传输,数据在每个间隙传输的概率P=1/N,如果传输成功,数据就按照这种结构请求明确的间隙进行传输,当冲突发生时,数据利用上面定义的概率选择空闲间隙继续传输。
(2)加权间隙选择。构造以下概率组:{β,2β,,Nβ},其中,β=1/(1+2++N)。加权间隙选择机制的目的是为请求数据提供一个尽快传输请求的机会,它利用比均衡间隙选择机制更高的传输概率(可能导致大量冲突)。
2.2 非实时间隔重发控制数据
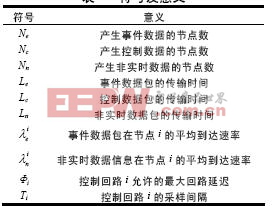
BA 算法假设网络通信是稳定的,但在本文中,考虑通信负载严重时的重传机制,在实际制造业自动控制和进程控制系统中,事件数据与控制数据相比出现的并不频繁,且由于事件数据拥有最高优先权,其传输不受控制数据和非实时数据传输的影响,因此重点考虑控制数据的重发。如果一个新的控制数据到达,则需要在实时间隔内立即发送传输请求。如果请求失败,当然它可以在下一个周期进行传输,但是这样的重传由于信息的传输延迟和发送延迟,最终导致实时信息的延迟,从而降低网络利用率。为减少实时控制数据的延迟,同时又不降低网络利用率,利用非实时间隔重发控制数据而无须分配另外的网络资源。表1 是本文中将用到的一些符号及其意义,同时系统参数是引用文献[5]中的,目的是与BA 做一个直观比较。
表1 符号及意义
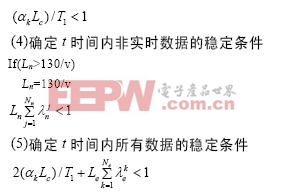
假设事件数据和非实时信息的到达过程是按泊松分布,控制数据的队列容量限制为一个,因为必须传输最近产生的传感器和控制域数据。为保证CAN 总线中系统通信稳定,数据到达速率必须限制在一定的范围并且不能超过网络容量。考虑事件数据在一个相当长的t 时间间隔在节点i 的平均数,为使队列系统稳定,服务所有数据所需的平均时间必须小于

- DSP在DSA70000系列示波器中的应用介绍(07-16)
- DSP在DSA70000系列示波器中的应用概述(08-11)
- 用FPGA实现FFT算法(06-21)
- FIR数字滤波器分布式算法的原理及FPGA实现(08-07)
- 基于算法的DSP硬件结构分析(04-02)
- 基于DSP的音频会议信号合成算法研究(05-10)