RSSI测距和距离几何约束的节点定位算法设计与实现
运用数值分析方法,求得最优解 三角形质心定位算法模型 本文研究了未知节点与其无线射程范围内的三个锚节点之间的通信约束和几何关系得出了未知节点所在三角区域,将三角形的质心作为未知节点的估计位置[8,9] 。这里的三角形质心定位算法的基本思想是:三个锚节点A、B、C,未知节点D,利用RSSI和距离几何约束算出节点A和D的距离为;节点B和D的距离为;节点C和D的距离为。分别以A、B、C为圆心rA,rB,rC , 为半径画圆,可得锚圆交叠区域,通过计算三个锚圆交叠区域的三个特征点的坐标,以这三个点为三角形的顶点,未知点即为三角形的质心(如图1所示)。 假设已知3个锚节点的坐标分别为A(Xa,Ya) 、B(Xb,Yb) 、C(Xc,Yc) ,与未知节点的距离分别为rA,rB,rC ,通过下面的公式求出。 同理,可以求出F点和G点的坐标,假设未知节点M的坐标,利用质心算法得到未知节点M的估计坐标为 : RDGC-TCL 算法过程 RDGC-TCL 算法包括使用Cayley-Menger行列式给出的距离几何约束条件对RSSI测量值进行处理来减小测量误差和利用三角形质心定位算法进行定位。 (1) 锚节点周期性发送自身的信息,信息中包括自身节点ID和自身位置坐标。 (2) 未知节点收到来自锚节点信息时,根据RSSI由强到弱对锚节点进行排序,并建立RSSI与节点到锚节点距离的映射。建立三个集合: (3) 选取RSSI值大的前几个锚节点进行计算,并采用距离几何约束来求得未知节点与锚节点距离的估计值。 (4)在Beacon_set中选择RSSI值大的锚节点组合成下面的三角形集合,这是提高定位的关键。Triangle_set= (5)对求出的未知节点坐标集合取平均值,得未知节点坐标。 仿真分析 为了验证算法的有效性,对定位算法进行仿真。仿真场景为一个120×120的矩形区域,100个节点被随机放在区域内,其中30个锚节点,70个未知节点。 采用距离几何约束来减少RSSI测距误差并结合采用三角形质心定位算法(RDGC-TCL 算法),算法性能主要从定位误差和定位覆盖率两方面进行考虑。仿真结果如图2、图3所示。 RDGC-TCL 算法在测距校正的过程总增加了计算量和计算时间,但对定位误差的减小和定位覆盖率的增加都有了较大的提高。由图2所示,在锚节点较少的情况下,本文算法的性能提高不大,因为提供校正的测量数据较少,随着锚节点数目增加,用于校正的测量数据的增加,使得测量的距离更加的准确,使得定位的精度有了较大的提高。图3表明本文算法相对于R_TCL算法在节点的覆盖率方面有较大的提高。 结语 本文针对RSSI测距误差,提出了基于RSSI和距离几何约束并结合三角形质心定位算法,仿真结果表明,本文算法比传统的RSSI定位算法有更好的定位性能,能够减小定位误差并提高节点定位覆盖率,同时本定位算法对硬件的要求不高,能够降低无线传感器网络的成本,能够满足大多数无线传感器网络的应用要求,是无线传感器网络节点定位一种可选方案。 
![]() ,进而得到未知节点与锚节点位置估计值:
,进而得到未知节点与锚节点位置估计值:

![]() 对Triangle_set中任一个三角形根据(7)式算出三个交点的坐标,最后由质心算法,得到未知节点坐标。
对Triangle_set中任一个三角形根据(7)式算出三个交点的坐标,最后由质心算法,得到未知节点坐标。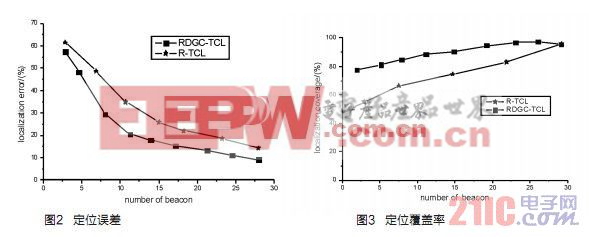
定位 算法 设计 实现 节点 约束 测距 距离 几何 RSSI 相关文章:
- 基于GPSOne技术的个人定位终端(07-30)
- 基于C8051的大灯仪自动定位系统(09-21)
- ARM-Linux平台下GPS信号的采集与处理研究(07-25)
- 基于TMS320C6711B DSP的中心定位算法设计 (09-30)
- 基于TMS320C6711中心定位实时图像处理设计(01-08)
- 磁浮列车模型定位系统的设计(07-27)