单片机控制的直流调速系统
时间:07-16
来源:互联网
点击:
5 调节器的设计
5.1 电流调节器的设计
电流调节器的设计参见图2。
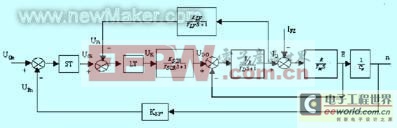 |
图2 单片机控制直流调速系统结构 |

差分方程: Ck=Ck-1+(K1+K2)ek-K1ek-1
其中, K1=K0-K’TLT
K2 = K’TLT
最后带入已知数据就可设计出电流调节器。
5.2 速度调节器的设计
在本次设计中按二次型性能指标最优控制[8]来设计速度调节器,首先求取速度环的状态方程,对于单输入系统,R为常数,选R=1,用计算机离线求出P阵,求出状态反馈阵为:
K = R-1BTP
若考虑速度调节器采用PI调节器,并加入比例微分负反馈,可以推导出:

6 系统软件设计
6.1 主程序设计
如图3所示的主程序流程图[9],它完成主程序完成系统的各种功能初始化操作。
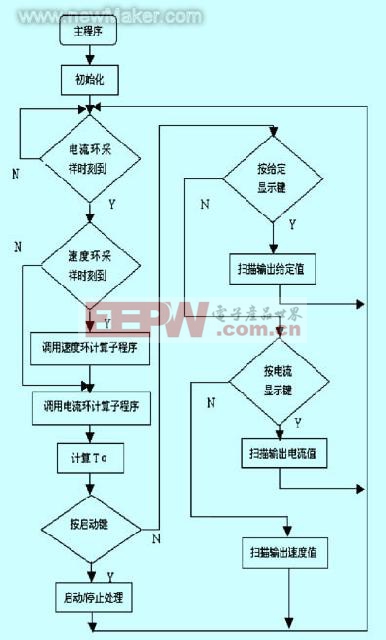 |
图3 主程序流程图 |
6.2 电流环中断服务程序的设计
它主要完成电机索零运算、电流调节器PI运算、轻载时电流自适应的运算。设系统电流断续临界值为I0,反馈电流采样值为I,则程序框图如图4所示。
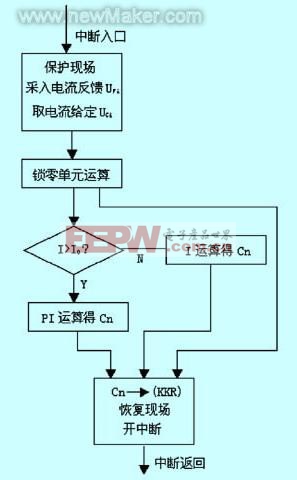 |
图4 电流环中断服务程序简化框图 |
6.3 速度环中断服务程序的设计
速度环计算子程序完成速度给定值输入、转速计算、偏差计算、PID计算、输出限幅等功能。程序框图略。
7 结束语
本设计用一台单片机及外部扩展设备代替原模拟系统中速度调节器、电流调节器、触发器、逻辑切换单元、锁零单元和电流自适应调节器等,从而使直流调速系统实现全数字化。用软件编程完成电流、转速等各项参数的计算,实现最优化调节。
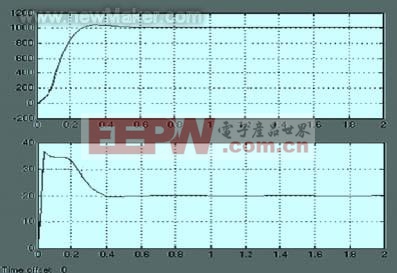 |
图5 转速、电流仿真曲线 |
通过图5所示的MATLAB仿真[10]结果可以看出系统运行稳定,稳态无静差,电流超调量≤5%,控制效果比较理想。
- 单片机控制点阵矩形收缩闪烁源程序(12-02)
- 单片机控制点阵LED一秒刷新显示I心形U(12-02)
- 51单片机控制直流电机正反转程序(12-02)
- 关于单片机控制开关三极管总结(12-01)
- 单片机控制18路舵机的C程序(12-01)
- 单片机控制开关电源(12-01)