车载自组网的现状与发展
除了基于CSMA/CA和时隙类的MAC协议外,还有一些其他类型的MAC协议,如令牌环。在具备GPS系统的车辆问可以使用基于非竞争性的令牌环接入方式(如WTRP协议),以提高信道利用率,避免信道冲突,更能满足车辆间安全预警通信的时延要求。在车载自组网中应用令牌环的主要思想:在广播信道上通过令牌组成逻辑环来控制信道的接入,为表述方便,称本车辆(对应通信网络中的本地节点)为TS(this station);前一车辆(对应通信网络中的上一节点)为PS(previous station);后续车辆(对应通信网络中的后续节点)称为NS(next smtion)。考虑实际车辆队列中,设车辆A,B,C构成队列,队列内采用无线令牌环协议,三辆车组成逻辑令牌环,令牌传递顺序为A—B—C—A。设某一时刻B为令牌拥有者,令B为TS,相应的A为PS,C为NS。网络结构示意如图6所示,图中箭头方向表示令牌传递方向,当车辆持有令牌后才能开始进行数据的发送,而那些没有持有令牌的车辆只能进行数据的接受。当传送完一定的数据后,令牌拥有者把令牌传递给后续车辆,开始下一辆车的数据传送。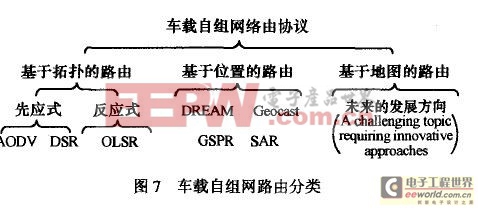
5 路由协议
由于车载网络拓扑的频繁变化,节点移动速度很快,路由技术成为了车载自组网中的重大挑战之一。在早期实验平台中使用的是一些简单洪泛路由技术。目前,在车载自组网中使用的路由协议大致可以分为3 类:
① 基于拓扑的路由(TBR,topology—based routing)协议;
②基于位置的路(PBR,position—based routing,)协议;
③基于地图的路(MBR,map—based routing)协议,如图7所示。
GPSR(greedy perimeter state—less Routing)是比较有名的利用地理位置来优化路由协议,基本思想是:节点在发送数据前不寻找路由,不保存路由表。移动节点直接根据位置信息(包括自己的、邻节点的以及目的节点的位置信息)制定数据转发决策。数据分组中通常携带目的节点的地理位置信息。网络中相邻节点问通过周期性广播分组获得其他节点的位置信息。源节点或中间节点根据这些位置信息,将数据分组传送给一个或多个相对自己而言距离目的节点更近的邻节点,如图8所示。GPSR在高速公路上性能不错,但是在城市环境中存在着缺陷。
空间感知路由协议SAR(spatialaware routing)是针对路由空洞障碍的进一步改进,也可以说是在GPSR路由协议的基础上的进一步改进,基本思想是:建立一个网路节点组成的空问模型图,模型图中的点表示车辆网络中的一些重要连接点(车辆、路边设施等),边表示连接点之问的连接。图中的点是根据GIS中有用信息午提取出来,最后通过编写一个地理数据文件(geographic data files)语法分析器,从空间模型图中提取道路的相关信息。把源节点和目的节点的位置映射到空问模型中,然后利用图论中的最短路经算法来计算源到目的节点的路径。但是空间感知路由协议SAR存在一个缺点,空间模型建立是否准确,决定了路径上是否有合适的转发节点。
通过表3,对车载自组网中使用的路由技术进行一个横向比较: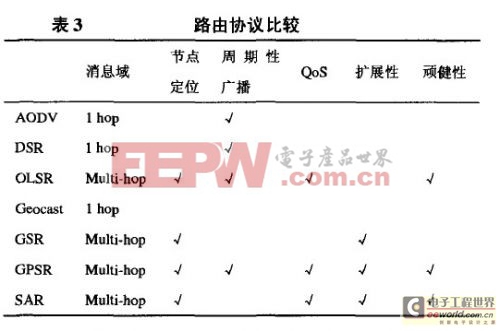
6 结语
随着人们对个人通信要求的提高,人们越来越希望有一种更安全、高效率的方式移动到目的地,车载自组网将会是未来的重点发展方向,其中MAC层和路由层的设计将是车载自组网所面临的最重大挑战,MAC层需要解决的问题有无线信道划分、分配和能力控制,向网络层提供统一的服务,屏蔽物理层不同的信道控制方式,实现拥塞控制、优先级排队、分组发送、确认、差错控制和流量控制等;路由层的侧重点在于如何建立完全分布式的、适合高速拓扑变化车载网络的路由协议。最终整个车载自组网的目标是制定一个通信标准协议,使不同厂商的车辆之间都能实现自由通信。
- 基于DL/T645规约的电能表集抄无线传感器网络MAC协议设计(01-07)
- 基于ARM的IEEE802.11bMAC层协议IP核设计(10-29)
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)