车载自组网的现状与发展
引言
交通事故因其极强的“杀伤力”被称为世界“头号杀手”。作为智能交通系统重要基础之一的车辆网络概念就是在这种需求背景下提出的。车载自组网是专门为车辆问通信而设计的自组织网络,它创造性地将自组网技术应用于车辆间通信,使司机能够在超视距的范围内获得其他车辆的状况信息(如车速、方向、位置、刹车板压力等)和实时路况信息。车载自组网的设计目标是建立一个车辆间通信的平台,不仅提高交通效率,还为司机的通行带来可靠安全和多重便利,使旅行者更加舒适。在2003年I1ru—T的汽车通信标准化会议上,各国专家提出的车用自组织网络(VANET,vehicle ad-hocnetworks)技术有望在2010年将交通事故带来的损失降低50%。
2 车载自组网简介
自组网是一种无线分布式结构,强调的是多跳、自组织、无中心的概念。因此可以把车载自组网(VANET,vehicle ad hoc networks)定义为一种快速移动户外通信网络(fast moving outdoor commu—nication network),也有人把车载自组网称为自组织交通信息系统(SOTIS,self-organizing traffic informationsystem)。车载自组网的基本思想是在一定通信范围内的车辆可以相互交换各自的车速、位置等信息和车载传感器感知的数据,并自动的连接建立起一个移动的网络。节点的单跳通信范围只有几百米到一千米,每一个节点(车辆)不仅是一个收发器,同时还是一个路由器,因此采用多跳的方式把数据转发给更远的车辆。
2.1 网络结构
整个车载自组网分为两部分:车与车(V2V,vehicle to vhicle)和车与设施(V2I,vehicle toinfrastructure)。图1显示了车载自组网在真实环境中应用的一个模型示意: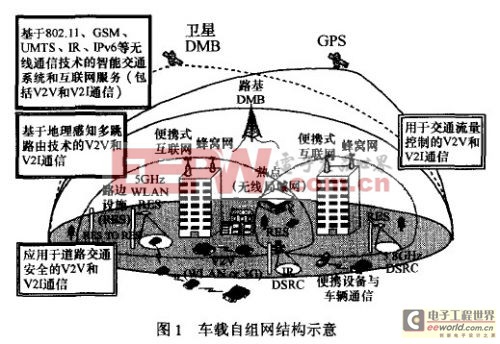
可以看到,卫星通信系统分别为车载自组网提供全球定位服务(GPS,global positioning system)和数字多媒体服务(DMB,digital multimedia broad—casting)。车与车通信使车辆之间能够通过多跳的方式进行自动互联,这好比车与车之间能够像人一样互相交谈,起到提高车辆运行的安全和疏导交通流量等作用。车载自组网除了可以单独组网实现局部的通信外,还可以通过路灯、加油站等作为接入点的网关(gateway),连接到其他的固定或移动通信网络上,提供更为丰富的娱乐、车内办公等服务。在本文中,针对车载自组网的特点和技术难点,主要讨论车与车之间通信的自组网方式。
2.2 主要特点
车载自组网是极其特殊的移动自组织网络,它同样存在一般无线自组网所固有的问题,如隐藏点问题、暴露点问题、信道捕获问题等,不过也带有自身独特的特性。车载自组网的主要特点包括:
① 由于节点高速移动性(速度大致在5-42m/s之间),导致网络拓扑结构变化快,路径寿命短,例如平均速度为lOOkm/h的道路上,如果节点的覆盖半径为250m,则链路存在15s的概率仅为57%。
② 无线信道质量不稳定,受多种因素影响,其中包括路边建筑、道路情况、车辆类型和车辆相对速度等。
③ 节点通过发动机可以提供源源不断的电力支持,车辆的承载空间也可以确保天线的尺寸和其他额外的通信设备,同时还具有强大的计算能力和存储能力等。
④ 节点移动具有一定的规律性,只能沿着车道单/双向移动,具有一维性。
⑤ 道路的静态形状使得车辆移动是受限制的,车辆轨道一般可预测。
⑥ GPS能够为节点提供精确定位和精准时钟信息,利于获取自身位置信息和进行时钟同步。
⑦ GPS和电子地图相结合,利用路径规划功能,将使车载自组网路由策略的实现变得更为简单。
2.3 应用举例
车载自组网在交通运输中出现,将会扩展司机的视野与车载部件的功能,从而提高道路交通的安全与高效。典型的应用包括:
① 行驶安全预警。利用车辆间相互交换状态信息,通过车载自组网提前通告给司机,建议司机根据情况作出及时、适当的驾驶行为,这便有效的提升了司机的注意力,提高驾驶的安全性。
② 协助驾驶。帮助驾驶员快速、安全的通过“盲区”,例如在高速路出/入口或交通十字路口处的车辆协调通行。
③ 分布式交通信息发布。改变传统的基于中心式网络结构的交通信息发布形式,车辆从车载自组网中获取实时交通信息,提高路况信息的实时性,例如,综合出与自身相关的车流量状况,更新电子地图以便更高效地决定路径规划。
④ 基于通信的纵向车辆控制。通过车载自组网,车辆能根据尾随车辆和更多前边视线范围外的车辆相互协同行驶,这样能够自动形成一个更为和谐的车辆行驶队列,避免更多的交通事故。
3物理层参数
由于车载自组网独特的性质,决定了其对物理层的要求比较苛刻:要求在高速移动的环境下具有较强的顽健I生,减少因高速移动引起的信号突变所带来的影响,尤其是在高速下产生的多普勒效应等的影响;支持高速率传输,提供多跳连接(甚至是在节点密度比较小的情况下),保证足够的信息交互;而且对于安全报警信息延迟要非常小,支持突发性数据流,保证其实时性;与MAC层协议接口相匹配;另外,需要工作在无需授权的频段内,以保证其应用普及。
- 基于DL/T645规约的电能表集抄无线传感器网络MAC协议设计(01-07)
- 基于ARM的IEEE802.11bMAC层协议IP核设计(10-29)
- Windows CE 进程、线程和内存管理(11-09)
- RedHatLinux新手入门教程(5)(11-12)
- uClinux介绍(11-09)
- openwebmailV1.60安装教学(11-12)