一种双CAN口同步通讯板的设计
随着现代战争要求武器系统在战场条件下的可靠性和维修性提高,传统分离式控制系统的快速保障难以满足要求。这里提出一种基于TMS320LF2407A的双CAN口同步通讯板设计,TMS320LF2407A是TI公司推出的一款定点DSP控制器,它采用了高性能静态CMOS技术,使得供电电压降为3.3V,减小了控制器的功耗;40MIPS的执行速度使得指令周期缩短到25ns(40MHz),从而提高了控制器的实时控制能力;集成了32K字的闪存(可加密)、2.5K的RAM、500ns转换时间的A/D转换器,片上事件管理器提供了可以满足各种电机的PWM接口和I/O功能,此外还提供了适用于工业控制领域的一些特殊功能,如看门狗电路、SPI、SCI和CAN控制器等,从而使它可广泛应用于工业控制领域。
2 双CAN口同步通讯板总体设计方案
TTCAN通过独占窗口的方式解决消息传送的确定性问题,提高总线利用率,试图满足应用发展的要求。但是在恶劣环境的高误码率下,传送的可靠性下降,容错的措施不成熟,成本较高。PLC可编程逻辑控制器,一种数字运算操作的电子系统,专为在工业环境应用而设计的。它采用一类可编程的存储器,用于其内部存储程序,执行逻辑运算,顺序控制,定时,计数与算术操作等面向用户的指令,并通过数字或模拟式输入/输出控制各种类型的机械或生产过程。是工业控制的核心部分。 图1为双CAN口同步通讯板原理图。

考虑到PLC的循环工作模式、数据发送时刻的随机性以及数据传输的非实时性等因素,则将MPC2515 CAN独立控制器作为PLC与同步通讯板之间的内部通讯接口。针对系统TTCAN网络必须在指定时隙内实时完成数据接收、发送、交换和处理的特点,只有将 TMS320LF2407的内部CAN控制器配合内部高速总线、高速RAM以及DSP强大的运算能力,才能满足TTCAN网络要求,因此选用 TMS320LF2407的内部CAN控制器作为TTCAN网络的通讯接口。
3 双CAN口同步通讯板接口硬件设计
3.1 同步信号接口
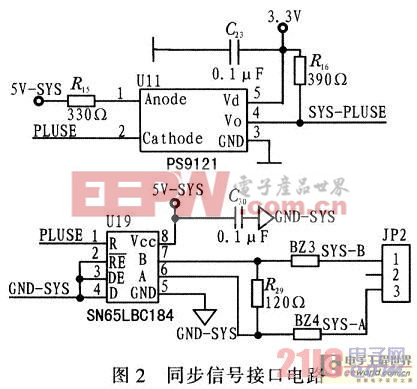
同步信号是指在同一载体内同时发出的多个信号源,使接收者能收到更多或更好的信息。同步信号应包含行同步信号、场同步信号和色同步信号(彩色负载波)三种。为了进一步提高同步信号抗干扰能力,在两条差分传输线输入端采用磁珠消除叠加在同步信号上的共模干扰,并采用高速光耦隔离对通讯板其他器件的干扰,这样可以确保同步信号接口的可靠性,其电路设计如图2所示。
3.2 同步通讯板与PLC CAN接口
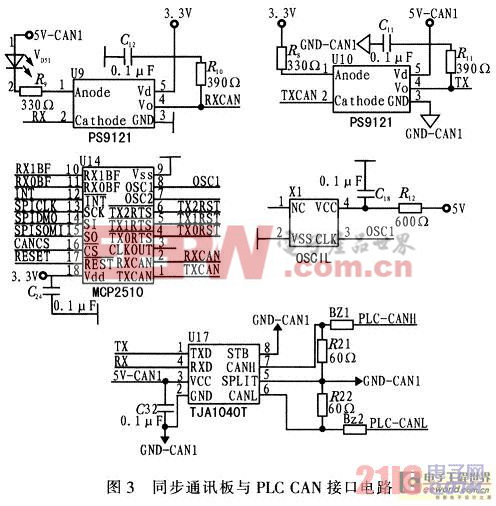
该接口电路使用CAN2.0B协议实现与PLC的数据通讯。TMS320LF2407通过10 MHz SPI接口配置MPC2515的参数。数据收/发控制均采用硬件方式将信号接入TMS320LF2407的外部中断源INT2与INT3。TMS320LF2407可以对MCP2515进行读操作;当RX0BF和RX1BF为高电平时,表明MCP2515未接收到有效数据。发送请求控制使用TMS320LF2407的IO接口向MCP2515发出硬件请求命令TX0RST, TX1RST,TX3RST来实现快速发送请求。其电路设计如图3所示。
4 双CAN口同步通讯板软件设计
双CAN口同步通讯板软件分为3个模块:
(1)CAN随机通讯模块负责与PLC的随机CAN通讯,接收来自PLC的突发数据,发送来自TTCAN网络数据;
(2)TTCAN通讯模块负责与TTCAN网络通讯,TTCAN是一种基于CAN总线充分利用时间触发与事件触发两种机制优点的新型协议,其具有带宽利用率高、通讯延时低以及消息传输可管理等特点,对于分布式硬实时系统的应用以及解决网络控制系统中消息延时具有重大的意义。在同步信号控制下按时序要求向TTCAN网络发送数据和接收来自PLC的随机CAN数据:
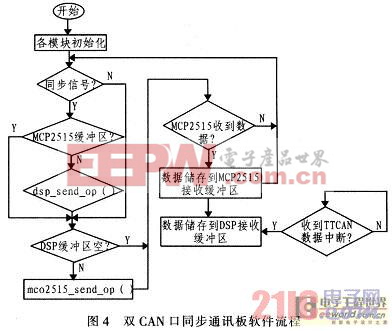
(3)数据缓冲模块负责PLC和TTCAN网络数据的同步,完成必要的通讯处理任务。图4为各模块之间的协同工作流程。
4.1 CAN随机通讯模块软件
首先初始化TMS320LF2407的SPI接口,然后设置MCP2515 CAN的通讯参数完成模块的初始化。函数SPI_WRITE_COMMAND(unsigned int ADDRESS,unsigned intDATA)更新MCP2515的指定寄存器中的内容;函数SPI_READ_COMMAND (unsigned int ADDRESS) 读取MCP2515指定寄存器;函数RTS_123(unsigned int NUM)从数据缓冲区提取数据按指定通道数据发送给PLC;函数RANDOM_RCV()将来自PLC的数据经查询接收后存放到数据缓冲区。
4.2 TTCAN通讯模块软件
该模块由甬数CAN_INIT()完成对TMS320LF2407内部CAN控制器的初始化及通讯参数设置;函数dsp_can_send(unsigned int IDH,unsigned int IDL,unsigned int*data1)从数据缓冲区提取数据向TTCAN网络发送;接收中断服务函数CAN_RCV_ISR()从TFCAN网络接收数据并存入数据缓冲区;而同步信号接收函数sytem_syn()实现与TTCAN网络的同步以及发送时隙的控制。
4.3 数据
- 基于FPGA的DSP设计方法(08-26)
- 电力电子装置控制系统的DSP设计方案(04-08)
- 基于DSP Builder的VGA接口设计(04-10)
- 基于DSP和USB的高速数据采集与处理系统设计(05-01)
- 数字信号处理(DSP)应用系统中的低功耗设计(05-02)
- 基于DSP的嵌入式显微图像处理系统的设计(06-28)