基于CAN 总线嵌入式驱动编程
5 CAN总线的嵌入式系统硬件设计 图1 SJA1000硬件连线 6 驱动软件设计 本设计中,CAN总线驱动程序是作为一个模块放在linux/deriver/char/文件夹里面,软件流程如图(2)所示,其设计详细介绍如下. 模块首先对引用的库函数进行申明,并且定义: 7 结束语
本设计选用Samsung公司的S3C4510B作为嵌入式系统的微处理器芯片,该处理器是16/32位RISC微处理控制器,内含由ARM公司设计的16/32位ARM7TDMI RISC处理器核,适用于价格及功耗敏感的场合.除内核外,该微处理器的片内外围功能模块包括:2个带缓冲描述符的HDLC通道;2个UART通道;2个GDMA通道;2个32位定时器及可编程I/O口.CAN控制器选用philips公司的SJA1000,该芯片与PCA82C200电气兼容,带64字节先进先出(FIFO)堆栈,兼容协议CAN2.0B,支持11位和29位识别码,位速率可达1Mbps,24MHZ时钟频率,芯片内含寄存器,可由用户配置CAN总线波特率,设置验收屏蔽标识码,可配置系统为PeliCAN 模式或BasicCAN模式,出错告警等.
该系统采用82C250作为收发器,其硬件连线如图(1)所示.AD0~AD7与S3C4510B的p0~p7连线,/cs接p12,ALE接p13,/RD接p14,/wr接p15,/int接XINTREQ0.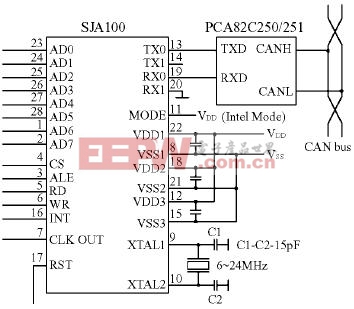
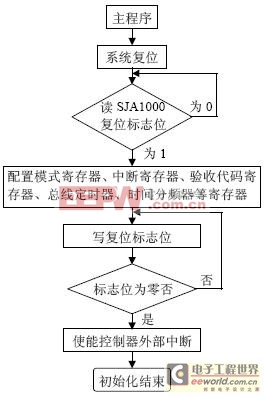
图2 CAN总线初始化框图
#define IOPMOD (*(volatile unsigned *)0x3ff5000)
#define IOPDATA (*(volatile unsigned *)0x3ff5008)
#define IOPCON (*(volatile unsigned *)0x3ff5004)
#define EXTDBWTH(*(volatile unsigned *)0x3ff5
#define SYSCFG(*(volatile unsigned *)0x
主要有以下几个模块:
void can_init(void)
{
SYSCFG =SYSCFG 0x0fffffffd;
EXTDBWTH =EXTDBWTH 0x00ff0ff;
IOPMOD=0xf0ff;
IOPDATA=0x6000; 寄存器地址0,MOD寄存器
IOPDATA= IO_PDATA0xdfff; ALE=0 配置MOD寄存器
IOPDATA= IO_PDATA|0x3f; ; 复位模式、使能
IOPDATA=0x6006; ;寄存器地址6,总线定时器0寄存器
IOPDATA=IO_PDATA0xdfff; ALE=0配置寄存器
IOPDATA= IO_PDATA|0x3f; 跳转宽度、波特率设置
……;配置总线定时器1、验收代码寄存器等
IOPDATA=0x6000; SJA1000 寄存器地址0,MOD寄存器
IOPDATA=IO_PDATA0xdfff; ALE=0配置MOD寄存器
IOPDATA= IO_PDATA0xfe;写复位位,进入工作模式
result = register_chrdev(254,"can",can_fops);申请主设备号
if (result0) {
printk(KERN_WARNING "CAN:can’t getmajor ", result);
return result;
}
在该驱动程序中,定义结构变量can_fops为应用程序访问内核的接口:
static struct file_operations can_fops = {
read: can_read,
write: can_write,
open: can_open,
release: can_release,
};
static int can_release(struct inode *inode, struct file *file)
{
MOD_DEC_USE_COUNT; ;用户减计数
Return 0;
}
static int can_open(struct inode *inode,struct file *file)
{
Scull_Dev *dev;
Int num = NUM(inode->i_rdev); 设备号
Int type = TYPE(inode->i_rdev); 设备类型
If (num>=scull_nr_devs) return -ENODEV;
dev = scull_devices[num];
flip->private_data = dev;
MOD_INC_USE_COUNT; 用户数人工计数
IOPCON=0x16; //xIRQ0
disable_irq(INT_can);
if(request_irq(INT_can, can_rx,
SA_INTERRUPT, "can rx isr","can")) {
printk("s3c4510-can: Can't get irq %d\n",
INT_sja1000);
return -EAGAIN;
}
printk("can has get irq 0\n");
enable_irq(INT_can);
…… ; 配置SJA1000内部中断及屏蔽寄存器
return 0;
}
本文介绍了CAN总线在嵌入式系统中的驱动编程,对CAN总线技术在嵌入式系统中的应用进行了探索.本设计已在通信用逆变电源远程监控系统中应用.
- 对TTCAN的分析(05-26)
- 嵌入式Win CE中CAN总线控制器的驱动设计与实现(05-01)
- μC/OS-II的多任务信息流与CAN总线驱动(07-11)
- 采用CAN总线实现DSP芯片程序的受控加载(11-08)
- 基于DSP的电动汽车CAN总线通讯技术设计(10-08)
- 基于DSP的CANopen通讯协议的实现(01-18)