基于凌阳16位单片机的智能车设计
时间:09-02
来源:互联网
点击:
其中,β为电流反馈系数,n为转速, α为转速反馈系数。ASR为转速比例积分调节器,用来实现转速无静差。ACR为电流比例积分调节器,用来实现电流无静差。当两个调节器都不饱和时,双闭环调速系统在稳态工作点上,PI调节器的稳态输出量与输入量无关。软件程序设计
软件程序由主程序、寻迹模块程序、避障模块程序、避障语音播报程序和LED显示车体转向程序等几部分组成。图6、图7即为主程序和寻迹程序流程。
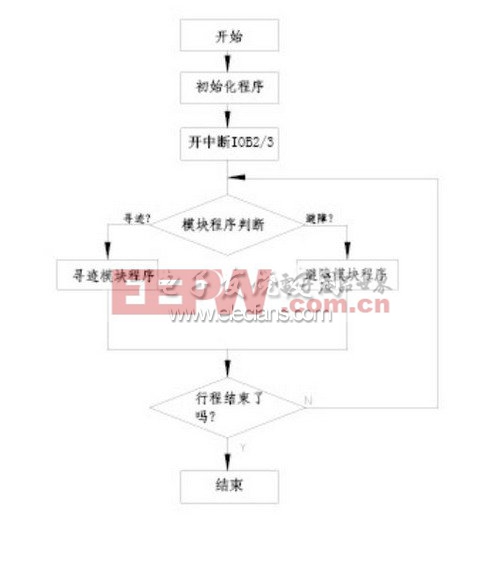
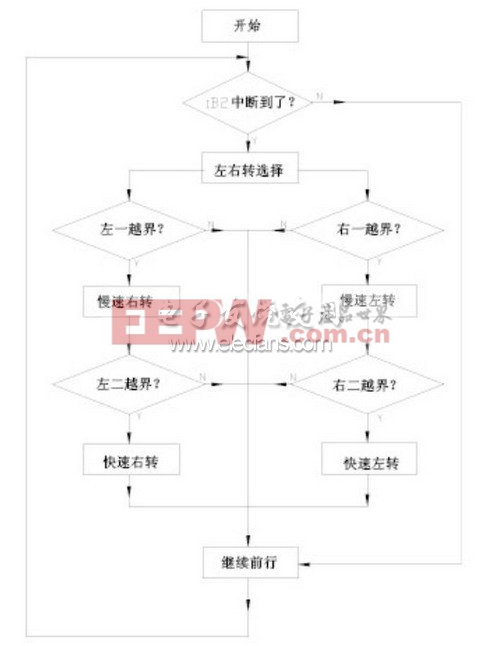
图6 主程序流程图 图7 寻迹程序流程图
PWM算法的实现
凌阳SPCE061A单片机提供了两个16位定时器,分别有相应的定时器控制寄存器设计相关参数,P_TimerA_Ctrl(700BH)和P_TimerB_Ctrl(700DH)的第6~9位设置该定时器输出不同频率的脉宽调制信号。
智能车实地调试
小车的实际调试是让小车运行在一个指定或任意给定的由纸板构成的迷宫通道,通道设有两个进出入口。开始测试时将小车放置在入口处并打开小车电源,小车可以顺利地在迷宫内实现躲避障碍,最后从迷宫的另一个出口出来。循迹的测试是在一张空旷的贴有一定黑线轨迹的桌子上进行,测试结果显示,小车可以按照比赛的要求进行循迹、转向和避悬崖。
结语
本次设计的智能车是机电一体化的综合产品。循迹模块能实现寻黑线车体的自由运转。小车可以顺利地完成拐直角弯道或者掉头返回(180°转弯)等操作。
- 基于FPGA的DSP设计方法(08-26)
- 电力电子装置控制系统的DSP设计方案(04-08)
- 基于DSP Builder的VGA接口设计(04-10)
- 基于DSP和USB的高速数据采集与处理系统设计(05-01)
- 数字信号处理(DSP)应用系统中的低功耗设计(05-02)
- 基于DSP的嵌入式显微图像处理系统的设计(06-28)