基于PLC系统的现场总线运动控制模块的设计和实现
在通信序列"000"中创建Step00和Step01 2个通信步。Step00用于控制运动控制模块的运行,Step01用于查询运行状态。在每一个通信步中包括步号(Step)、重复计数器(Repeat)、命令(Command)、重试次数(Retry)、发送信息(Send Message)、接收信息(Recv Message)、是否响应(Response)、出错处理方式(Error)等内容。 (2)创建发送和接收信息 发送信息与接收信息必须严格按照Modbus协议格式编写,需要设置校验码(Check Code)、数据长度(Length)、地址(Address)和数据(Data)等信息。 (3)创建接收阵列 PLC向运动控制模块发送指令时,模块可能返回运行正常或错误响应信息,在接收数据时,使用阵列的形式加以区分。系统创建了2种可能接收的信息"Run Normal"和"Error",并针对每一种情况设定不同的处理方法(Next Process),用于可能出现的各种响应信息的处理。 2.2.2 通信实现 (1) 通信设置 PLC的通信参数设定必须与运动控制模块的参数一致。对通信板上的开关做调整时,设SW1置于ON侧,使用RS-485方式;SW2设定为ON,接入120 Ω的终端电阻;设定通信板端口A为通信协议宏方式。 (2) 编写通信程序 通信协议宏的调用程序段如图7所示,图中:289.08为通信板端口A操作标志,当289.08为OFF时,表示可以使用端口A进行通信。通信过程中289.08置为ON,通信结束后,289.08置为OFF状态;当2.00由OFF变为ON、且289.08为OFF时,调用通信板上的通信序列,通过端口A发送和接收数据。通信序列号、发送和接收数据的存放区由PMCR指令的3个操作数指定,其梯形图见图7. 使用2片32位高性能单片机组成双核系统实现运动控制模块的功能,兼顾了性能和价格。同时因为使用了ANSI C的标准库函数,程序移植性好,数控解释程序中的关键技术G代码解释器的开发难度大大降低。在运动控制模块中移植Modbus协议,从而使其能简单地与PLC系统组成运动控制网络。采用欧姆龙通信协议宏实现控制多台运动控制模块,简化了现场布线,达到了设计要求,取得了很好的效果。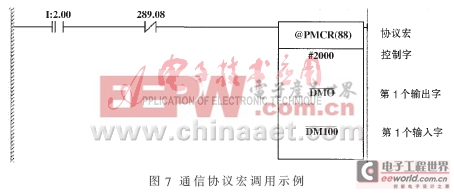
- 提高PLC系统的抗干扰措施(12-14)
- PLC系统在使用及应用过程中注意问题(02-18)
- 智能电量传感器在西门子PLC系统上的应用(12-06)
- 电动车充电智能化挑战 G3-PLC技术解决(01-16)
- PLC系统的抗干扰技术在应用中的实际操作(11-30)
- 利用NI机器视觉方案改进PLC系统(08-13)