一种环真空监控系统设计方案
传统的现场控制技术(例如BITBUS,RS-485,RS-422等)其不足之处主要有:
(1)主从结构网络上只能有一个主节点,其余为从节点。其造成的潜在危害是:一旦主节点出现故障,则整个系统将处于瘫痪状态。
(2)数据通讯方式为命令响应型。在许多实时性要求较高的场合,这是致命的弱点。错误处理能力不强。
(3)不能提供类似LAN那样的网络管理(network management)功能,从而不能对整个系统进行实时、有效、方便的监控和维护。
现场总线很好地解决上述问题。其中较有代表性的有Motorola的LON(local operation network);Bosch公司的CAN(control area network)。其中LON适用于一些大型的、对响应时间要求不太高的分布式控制系统;而CAN则适用于小型的、实时要求高的系统。
CAN协议规定的网络系统结构由ISO-OSI七层结构中的三层组成,即物理层、数据链路层和应用层。它是一种专门用于工业自动化领域的网络,不同于以太网等管理及信息处理网络,其物理特性和网络协议更强调自动化的底层监测和控制。从物理结构上看,它属于总线式通讯网络,但其独特的技术和设计,可靠性及性能远高于BITBUS,RS-485等传统现场控制技术。特点主要有:可以多主方式工作,网络节点可分优先级,采用非破坏性总线裁决技术,直接通讯距离最远可达10 km(5 kb/s以下),通讯速率最高可达1 Mb/s(距离40 m),信息传输采用短帧结构,每帧信息都有CRC校验,保证了数据出错率极低,在错误严重的情况下节点可以自动关闭,切断与总线的联系,通讯介质采用双绞线。
1 系统组成和工作原理
合肥国家同步辐射实验室(NSRL)的储存环直径为22 m,每条光束线的长度约15 m。用于环真空检测的真空计约10台,5条光束线平均5台真空计,共计约35台真空检测装置,另外每条光束线还利用一台真空计作为传感器用于真空联锁保护装置。由于真空检测装置及联锁保护装置必须靠近监测点,它们遍布整个储存环大厅。这些真空计是84年建立实验室后逐年购进的,基本没有数据通讯接口,制造厂家也千差万别。储存环真空检测主要有德国、日本、美国的真空计,光束线主要是国产真空计。可用于真空检测的模拟电平也不尽相同,另外储存环大厅有很多电磁铁和高功率电源,是典型的强噪声环境,用模拟电平进行监测控制和组网是不切实际的,也是不可靠的。因此目前NSRL的环真空监测是采用人工记录的方法,光束线真空监测基本不作记录。目前光束线用于控制各种阀门的真空联锁保护装置是模拟电路系统,为了提高响应速度,直接从真空计的离子流放大器上取出0~10 V的模拟电平,与联锁保护装置的连接电缆阻抗非常高,很容易造成阀门的错误关断,也容易影响真空计的读数,甚至损坏真空计的离子流放大器。所有这些关系到束流运行的稳定和寿命,是迫切需要解决的。
经过多方调研和比较,提出采用适合于高噪声环境运行的CAN总线组网。多个真空计及其联锁保护单元通过CAN控制器挂到CAN总线上,通过CAN总线与监控计算机互联,形成多主机局部控制网。目前NSRL的储存环和光束线需要监控的节点约40个,二期改建工程完成后需要监控的节点将扩大到80个,而一条CAN网络可控制110个节点,完全能满足要求。该分布式测控系统结构组成如图1所示。
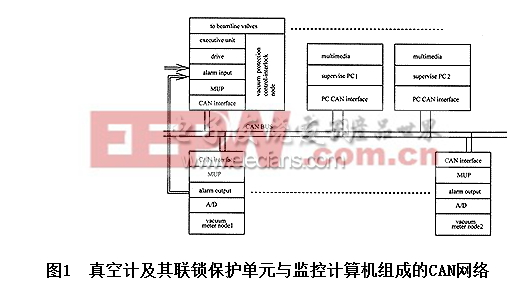
该系统的工作原理是通过监控计算机、真空传感器(真空计)、真空联锁保护单元,对储存环、光束线的真空状态和各阀门的开关状态进行实时监控。监控计算机根据实测值与安全设定值进行比较、分析和处理,及时提供语音、字符、图形、各种报警信号及相应的控制措施。由于储存环、光束线实验站的真空状态要求相差很大,为了提高对真空事故的反应速度和可靠性,储存环和每个光束线实验站有相应的真空联锁保护单元。该单元直接接收来自真空传感器的报警信号,可自动地或人为地作出相应的安全控制措施。该单元也通过CAN控制器挂到CAN总线上,使各种不安全因素得以及时、有效地调整和控制。2 系统硬件组成
如图1所示,该系统硬件主要由监控计算机、真空传感器和真空联锁保护单元等几部分组成。
(1)监控计算机由通用PC机加PC-CAN适配卡及多媒体外设构成。PC-CAN适配卡采用国产的Hilon系列CAN总线工控产品,随卡的软件包可支持用户开发专用的监控和驱动程序。
(2)真空传感器由规管和真空计组成。本实验室大多使用热阴极电离超高真空计和冷阴极磁控超高真空计。根据多年的使用经验,国外品牌性能较稳定、可靠,而国内品牌相比之下较差,返修率也非常高。为此根据不同规管特性要求和结合国外产品经验的基础上开发出两种类型的超高真空计:热阴极电离超高真空计和
- SN2005学习系统 数字语音室解决方案(05-19)
- 以可编程DSP架构应对TD-SCDMA以及TD-LTE带来的设计挑战 (02-14)
- ARM-μCLinux嵌入式系统启动引导的实现(07-26)
- 多核处理器架构及调试方案(03-28)
- 基于DSP的电源解决方案(06-13)
- 间歇性Bug最佳解决方案(09-24)