基于AVR单片机的多路遥控开关编解码实现
负荷缸是船舶电力核心发电机性能的负荷试验必备的重要工装设备,通过负荷试验,可以检验发电机长期工作的性能稳定的情况(静态特性)和对突加突卸负荷的应变能力(动态特性)。AVR单片机具有高性能低价格的优点,在本文中利用AVR单片机对发电机负荷缸的多路远程遥控开关量进行采集监控并进行数字信号编解码,用2芯的电缆取代原来40芯的粗电缆传输控制信号,有效地解决了工作中遇到的问题。
1 问题的提出
我们通过把由发电机供电的通电极板放到负荷缸水电阻中,用充气升降极板和补给水调节水电阻大小的方法控制试验发电机所带负荷的大小,对发电机的性能进行试验。体积庞大的负荷缸一般放置在码头,在船舶发电机的负荷试验中需要在船舶配电板处控制负荷缸的各个部件,所以我们在船舶配电板处安装了负荷缸遥控台,通过一条40芯约100 m长的多芯电缆连接负荷缸和遥控台。
在多年的使用经验中发现存在以下问题:
(1)因为电缆芯线繁多,工人接线时往往出现接错线的问题,导致遥控台没法正常工作,需耗费时间进行调试。
(2)这条多芯的电缆非常大,在每次试验安装的时候需要耗费很多人力进行拉放。
(3)经过长期多次的使用,会出现电缆芯线折断无法正常使用的现象,导致在试验期间需花费人力进行检查。
鉴于以上存在的问题,我们提出了以下的设想:寻找一种方法对这些多路遥控开关信号进行编码传送,然后在另一端进行解码,使得可以用两芯或较少的芯线来取代这条多芯电缆。
2 解决方案
对于以上遥控台和负荷缸连接原理图,因为在遥控台上由负荷缸供电的低水位回传信号指示灯等可以容易地改为由遥控台端供电,而在负荷缸端只提供开关量信号,于是实际的问题便变成了实现一种对多路遥控开关和返回开关量信号进行编码。刚开始考虑到采用T型电阻网络对这些开关进行采样,用A/D,D/A转换的方法实现,但为了保证信号长距离传输的可靠性,决定用数字信号的方式对这些开关量进行编解码,随着技术的进步使这种设想成为可能,经过综合比较,我们决定选用功能强大,价格便宜的ATMEL Mega8单片机对这些开关信号进行编解码和信号传输控制。
DIP封装的ATMEL Mega8单片机只有28个管脚,除掉电源和用于单片机之间通信必要的串行端口引脚,实际可用来做信号采集和输出的管脚远远不够,然而ATMEL Mega8单片机的12 MHz的高速运行速度相对于开关动作的速度来说极其快速,通过74SL244缓冲器和74SL273锁存器共用单片机管脚,在程序中控制缓冲器使能端,控制锁存器时钟信号的方法扩展单片机I/O口。2个74SL273锁存器和1个74SL244缓冲器共用单片机PB和Pc端口低四位管脚,单片机通过PB4,PD3,PB5管脚分别控制第一个、第二个锁存器的时钟脉冲输入端和缓冲器和使能端。我们在程序中设置单片机PB和PC端口低四位管脚为输入状态,控制74SL244缓冲器的使能端为低电平,并屏蔽两个74SL273锁存器的时钟输入,从而通过74SL244缓冲器采集负荷缸工作状态开关信号;在程序中设置单片机PB和PC端口低四位管脚为输出状态,控制74SL244缓冲器的使能端为高电平,并让单片机给其中一个74SL273锁存器的加上时钟输人信号,从而通过74SL273锁存器输出一组开关状态控制信号。
因为在负荷端和遥控台的连接距离接近100 m,超过串口RS 232信号可靠传送到达的距离,我们增加了SN75LBC184 RS 232/RS 485串行通信转换器芯片,SN75LBC184输人和单片机TXD、RXD管脚相连,单片机PD2引脚控制SN75LBC184芯片的收发使能端实现收发功能的转换,用两芯的电缆连接负荷缸端和遥控台端SN75LBC184芯片的输出端口,实现了单片机串口信号的远距离传送和电路的半双工工作
3 串行通信协议及编程实现
3.1 串行通信协议
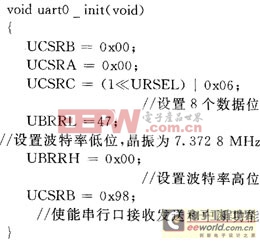
在从遥控台端单片机和负荷缸被控端单片机的通信中.我们选择通信协议为:9600波特率,8个数据位,1位停止位,无奇偶校验。
遥控台端单片机和负荷缸被控端单片机之间的通信方式采用主从定时请求应答方式,遥控台端单片机始终具有主动发送权,定时向负荷缸被控端单片机发送设置16个开关状态命令帧和读取回传指示灯开关状态命令,负荷缸单片机处于被动状态响应状态。
3.2 数据帧格式
在负荷缸的控制中,当发电机带负荷运行时,意外的主开关分闸信号等同于发电机突卸负荷,特别是当满负荷运行时意外的主开关分闸信号等同于发电机的瞬时100%突卸负荷,将导致发电机出现飞车现像,严重的损害发电机的性能,因此信号传输的可靠性非常重要,在本系统中遥控台到负荷缸的命令帧格式采用如图4所示的方法进行通讯握手和数据校验保证遥控台和负荷缸端的数据的可靠传输和控制。
- 锁相环控制及初始化简析(08-27)
- 基于AVR单片机的串口转FSK的通信模块设计(01-23)
- 基于AVR单片机的服装压力检测系统设计(05-03)
- 基于Atmel AVR单片机的无线图像侦检系统(10-19)
- avr单片机串口多机通讯及实例(12-03)
- AVR单片机入门系列(25)AVR PWM OC0(12-03)