基于现场总线通讯环境的Multi-Agent系统模型
CAN总线作为系统的通讯平台,构建一个“三轴门架搬运系统”(如图2所示)。三轴门架搬运系统模拟了一个在工作区域为直角平面的机械臂,它用来传送或者拣选工件。该模型由一个能在X轴、Y轴线性方向移动的机器臂②、一个适合沿Z轴方向运动的电磁手(未显示在图片上)、一个带有传输带的工件箱①、工件存放站点③和控制单元④组成。在每个运动方向的末端各有一个限位传感器,控制软件由此判断机器臂的工作区域。
模拟的过程是:金属的工件因工件箱的传输带从工件箱被传送到入站待定位,途中经过识别单元,对工件型号进行识别。机械臂移动到入站待定位上方,电磁手在负Z轴方向运动抓住工件,电磁手复位,机械臂移动到工件型号相对应的存放站的上方,电磁手再次在负Z轴方向运动,电磁手失电消磁,工件被放在这个规定位置,电磁手复位。这个过程就完成了工件的炼选搬运工作。

图2 三轴门架搬运系统硬件设备图
整个系统底层现场总线控制网络采用CAN总线网络。现场监控主机⑤的监控应用程序采用VC编程实现。现场监控主机也作为CAN网络服务器,安装倍福公司的CANOPEN FC510X现场总线接口卡和TWINCAT网络管理和服务工具软件。监控应用程序通过TWINCAT实现与设备节点的通讯。
为了实现整个系统,系统共有分类炼选Agent、单元化Agent、控制Agent和监控Agent四个Agent组成(如图3所示)。
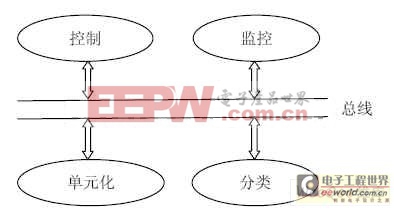
图3 三轴门架搬运系统Agent结构图
1) 控制Agent
控制Agent的主要功能是完成自身的控制算法,并根据任务需要与其他Agent组成动态的Multi-Agent合作系统。控制Agent所需要的控制命令和数据均通过CAN总线传输。在该系统中,控制Agent主要完成的任务是目标位置计算、运输带控制、机械手控制和状态监视。
2) 单元化Agent
单元化Agent相当于一个感知与执行Agent[7]。该Agent不仅能完成信号的采集,提取传感器的信号的特征形成监控变量,通过CAN总线传送给控制Agent。同时从控制Agent接受控制指令,并转化为与现场设备匹配的开关量。该系统中,单元化Agent主要完成的任务是检测工具箱中是否有工件,如果有工件,启动传输带将工具箱最底层的一个工件传送到准备入站的位置。无工件时,就停止传输带。
3) 分类炼选Agent
分类Agent业相当于一个感知与执行Agent。该系统中,该Agent主要完成的任务是分析并确定工件的类型,电磁手的控制和机械手的运动。
4) 监控Agent
监控Agent主要的任务就是在在远程的操作室内对工业现场的观察并且根据情况需要可以对现场设备布置任务。
通过CAN总线整个三轴门架搬运系统实现了各个Agent的通讯,使每个Agent可共享系统资源又可在同一时刻完成各自的任务。因此,整个系统可以安全、协调的完成工件的单元化、分类和搬运一系列任务。
6. 结论
本文结合现场总线技术和Agent理论给出了“三轴门架搬运系统”的Multi-Agent结构,并基于CAN总线技术构建了该系统。系统具有成本低、可靠性和稳定性好,智能化程度高等特点。各个Agent根据不断变化的环境所做出的局部决策,动态的显现出一个切实可行的调度,这样系统就具有较好的反应性和适应性。
本文作者创新点:分布式人工智能中的Agent和Multi-Agent理论在智能机器人的研究中有了一定的发展,但此理论未用于工业控制领域。各个Agent之间的通讯是Multi-Agent 系统在工业控制领域应用的关键,而与现场总线通讯的完美结合使的应用Multi-Agent理论在工业控制领域成为了可能。本文还结合了工业模型三轴门架搬运系统证明了此理论的可行性。
现场总线 Multi-Agent系统 相关文章:
- SHARC DSP与SJA1000的CAN总线接口设计(03-14)
- 现场总线与RS232、RS485的本质区别(12-21)
- 浅析现场总线的应用技术(12-21)
- 如何正确选用现场总线产品(12-21)
- 基于现场总线的加工中心用六轴数控系统(12-21)
- 基于现场总线的PLC控制变频造纸系统(12-21)