基于51单片机设计的简易智能机器人
时间:12-21
来源:互联网
点击:
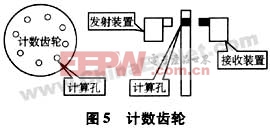
此外,为了清楚直观地观察到各传感器的工作状态,电路中还专门为每个传感器设计了工作指示灯,实时显示每个传感器的工作状态。
2.4 键盘输入单元
键盘输入单元采用独立式键盘,由2个按键组成,其中一个为启动键,另一个为显示切换键,当机器人行走完全程后,按下该键,将显示整个行走过程的时间。
2.5 显示单元
显示单元由2个7段数码管组成,为了减少整个系统的功耗,采用了由单片机软件译码,动态显示,实时显示每个断点到起点的距离以及整个运行过程的时间。
2.6 声光报警单元
用555作为振荡源,用单片机触发振荡源驱动电磁讯响器作为声音指示器和1只发光二极管作为光指示装置,从而组成声光报警单元。
2.7 电源单元
本系统采用2套电源分别对电机和控制电路进行单独供电。系统控制电路采用经7805稳压后的输出供电(5v),电机则采用4节aa电池来供电。
3 系统的软件设计
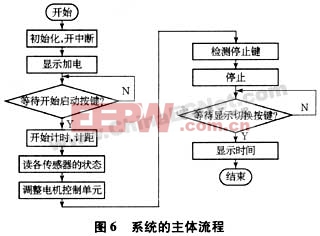
该系统配套的软件程序采用模块结构,由c语言编写完成。主要由初始化程序、偏道调整程序、偏离光源调整程序、声光指示子程序、读传感器状态、显示程序、定时器0的中断服务程序、定时器1的中断服务程序、外部中断0的服务程序、停车处理等模块组成。系统的主体流程如图6所示。
4 结束语
该机器人在认为设定的跑道上经过多次实验,达到了预期的效果,但是其智能化程度还远远不够。随着人工智能和神经网络技术的不断研究和深入,智能机器人的发展前景将会越来越广阔。
- 关于RTX51 TINY的分析与探讨(05-30)
- 浅析8051模块化编程技巧(05-28)
- 基于DSP和单片机通信的液晶显示设计方案(07-20)
- 锁相环控制及初始化简析(08-27)
- 基于MSP430自动胀管控制器的研究(09-07)
- 嵌入式C实现延时程序的不同变量的区别(03-01)