机械量,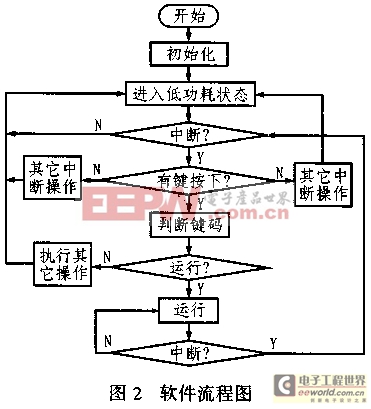 从而通过控制脉冲的个数来控制电机转动的时间,并通过改变脉冲的频率控制电机运转的速度。由电机驱动泵体的凸轮机构循环压缩胶管,从而实现输液功能。为了让输液泵安全、可靠地工作,并且从简化硬件电路的角度出发,步进电机的运行并不是由单片机来驱动达林顿管直接控制的,而是通过两根控制线对步进电机的驱动模块进行间接控制,并分别实现启动与控制。这里的步进电机驱动芯片选用的是MOO8335。启动信号用于启动步进电机,而运转时间和停止时间则由控制信号控制。本仪器输液的速度是通过步进电机停、转时间的不同来控制的,因为步进电机在整个运行期间,其转速可以保持恒定。
从而通过控制脉冲的个数来控制电机转动的时间,并通过改变脉冲的频率控制电机运转的速度。由电机驱动泵体的凸轮机构循环压缩胶管,从而实现输液功能。为了让输液泵安全、可靠地工作,并且从简化硬件电路的角度出发,步进电机的运行并不是由单片机来驱动达林顿管直接控制的,而是通过两根控制线对步进电机的驱动模块进行间接控制,并分别实现启动与控制。这里的步进电机驱动芯片选用的是MOO8335。启动信号用于启动步进电机,而运转时间和停止时间则由控制信号控制。本仪器输液的速度是通过步进电机停、转时间的不同来控制的,因为步进电机在整个运行期间,其转速可以保持恒定。
3 软件设计
MSP430的内核结构采用具有高透明格式的精简指令集(RISC)设计。指令分为硬件实现的内核指令和利用这一硬件结构的具有更高效率的模拟指令,使用起来非常方便。在本系统中,单片机完成初始化任务(设置标志位,设置定时器,比较器,看门狗的工作方式)后,就进入低功耗睡眠状态,任一中断均可将其唤醒,转而执行相应的子程序。单片机的大多数操作都采用中断方式。整个程序流程如图2所示。
4 结束语
在设计便携式医用自动输液器时,由于选用了超低功耗的MSP430单片机作为控制芯片而且其它的外围芯片功耗也很低,同时在软件设计中也充分采用了MSP430的多种节能工作方式,从而使得整机在工作中的功耗很小,可完全满足电池供电的要求。此外,由于MSP430单片机功能强大,外围芯片数目少,而且所有的元器件均选择贴片式,从而大大地减小了仪器的体积。该设计通过单片机驱动步进电机控制药液的输出速度,这使得注射速度更加均匀、输液精度更高,定时、定量准确、自动化程度也更高,因此可以达到在医院及家庭临床上使用的要求。目前该智能输液器已在临床上得到了应用。