基于视觉与超声技术机器人自动识别抓取系统设计
视觉传感器是指具有从一整幅图像捕获光线的数发千计像素的能力,图像的清晰和细腻程度常用分辨率来衡量,以像素数量表示,邦纳工程公司提供的部分视觉传感器能够瞧捕获130万像素,因此,无论距离目标数米或数厘米元,传感器都能quot;看到quot;细腻的目标图像,视觉传感器应用其本要素是掌握如何应用视觉传感器的两个关键点的照明和软件工具。
超声波传感器是利用超声波的特性研制而成的传感器。超声波是一种振动频率高于声波的机械波,由换能晶片在电压的激励下发生振动产生的,它具有频率高、波长短、绕射现象小,特别是方向性好、能够成为射线而定向传播等特点。
1 系统原理与结构
系统由机械手、CCD 视觉传感器和超声波传感器及相应的信号处理单元等构成. CCD 安装在机械手末端执行器上,构成手眼视觉,超声波传感器的接收和发送探头也固定在机器人末端执行器上,由CCD 获取待识别和抓取物体的二维图像,并引导超声波传感器获取深度信息. 系统结构如图1 所示.

图像处理主要完成对物体外形的准确描述,包括以下几个步骤:a. 图像边缘提取;b. 周线跟踪;c. 特征点提取; d. 曲线分割及分段匹配;e. 图形描述与识别.在提取物体图像边缘后, 采用周线跟踪进行边缘细化,去除伪边缘点及噪声点,并对组成封闭曲线的边缘点进Freeman 编码,记录每一条链码方向和曲线上各点的X-Y 坐标值,进一步对物体的几何特性进行分析.CCD 获取的物体图像经处理后,可提取对象的某些特征,如物体的面积、曲率、边缘、角点及短轴方向等. 根据这些特征信息,可得到对物体形状的基本描述,在图像处理的基础上,由视觉信息引导超声波传感器对待测点的深度进行测量,获取物体的深度信息,扫描得到距离曲线,根据距离曲线分析出工件的边缘或外形.
2 工件图像边缘的提取
复杂工件反映在图像上常常不止一个灰度等级,仅利用一个灰度阈值无法提取有意义的边缘.
这里采用了直接从灰度图像提取边缘的方法.图像边缘一般发生在灰度函数值不连续处,可用灰度函数的一阶或二阶导数求得. 经典的利用一阶导数提取边缘的方法有Robert s 算子、So2bel 算子等, 利用二阶导数提取边缘的方法有Laplacian 算子和Marrs2Hilderth 算子等. 通过对几种算法的分析比较,认为Sobel 算子不仅实现容易、运算速度快,而且可提供最精确的边缘方向估计.Sobel 算子由两个3 ×3 相差90°的算子构成,由这两个算子同图像卷积, 可得到图像的边缘及其方向. 对于数字图像{ f ( i , j ) } , Sobel 算子可表示为:
Gx ( i , j) = f ( i - 1 , j - 1) +2 f ( i - 1 , j) + f ( i - 1 , j + 1) - f ( i + 1 ,j - 1) - 2 f ( i + 1 , j) - f ( i + 1 , j + 1) ;
Gy ( i , j) = f ( i - 1 , j - 1) +2 f ( i , j - 1) + f ( i + 1 , j - 1) - f ( i - 1 ,j + 1) - 2 f ( i , j + 1) - f ( i + 1 , j + 1) .
采用G1 = | Gx | + | Gy| 得到梯度幅值后,为减少所抽取的边缘数目,可设置一个幅度门限,即只考虑对应灰度变化较大的那些边缘. 再利用边缘点具有局部幅度最大的特点,将边缘细化.利用Sobel 算子提取边缘后, 为了得到工件表面的尺寸信息, 还必须提取图像的角点 , 以便计算工件的边长等特征信息.
2. 1 形心坐标的确定
图像中形心点的计算通常可通过两种方法得出, 一是通过区域处理求矩的方法计算形心坐标 ;二是通过边缘链码积分计算。该算法较为简单,且对任意图形都适用,但需要结合像素点隶属区域划分算法进行.
2. 2 轴向的确定
为使机械手能以正确的姿态准确地抓取物体,必须精确确定物体的轴向. 在几何学中,物体的长轴定义为通过物体形心点的一条直线, 物体关于该直线的二阶矩为最小值. 设图像中物体长轴与图像平面X 轴正方向夹角为θ, 规定| θ| ≤π/ 2 ,则物体关于该轴线的二阶矩为

该算法较为简单,且对任意图形都适用,但需要结合像素点隶属区域划分算法进行.

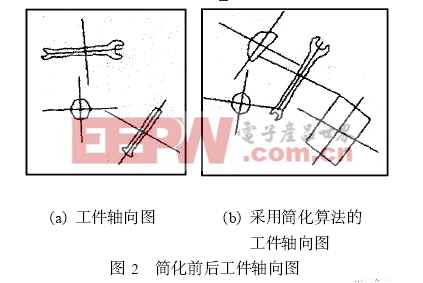
很明显,基于二阶惯性矩的轴向确定方法是对整个物体区域进行运算, 且必须先确定像素点的隶属区域,故运算量较大. 图2 (a) 是用该算法确定的工件轴向. 对于一些简单形状的物体,可采用如下简单轴向估计算法:
a. 确定物体的形心坐标;
b. 确定物体边缘轮廓闭合曲线前半段中离物体形心最近的点, 用最小二乘法估算该点的切线方向,设其与图像平面X 轴正方向夹角为α1 ;
c. 用同样方法确定下半段曲线中对应的切线方向α2 ;
d. 物体轴向可粗略估计为θ= (α1 +α2) / 2.
图2 ( b) 是采用简化算法得到的工件轴向图. 该算法仅对物体边缘轮廓点进
自动识别 系统 设计 机器人 技术 视觉 超声 基于 相关文章:
- 基于多cpu方式的自动识别控制系统(10-23)
- 自动识别启动模式Nand Or Nor(11-22)
- 自动识别技术与食品安全(05-21)
- 振动加速度检测中传感器连接状态的自动识别(08-15)
- 利用单片机的捕获功能自动识别铁路RFID标签数据(02-08)
- Linux嵌入式系统开发平台选型探讨(11-09)