分析基于ARM 的红外光汽车速度管理系统
近来汽车市场出现了一种叫“电子狗”的反雷达测速装置,这种装置在接近雷达测速区时,能够提前捕捉到雷达测速的信息并发出报警,使违章车辆逃脱处罚,事故隐患非常严重。本文分析的以红外光传感器、ARM 为核心部件的新型测速系统测速时不会被“电子狗”所发现,不仅能识别汽车速度V 的大小,还能测出其速度超过上限速度(Vmax)的量值(+△V)或低于下限速度(Vmin)的量值(—△V)等信息,据该信息酌情驱动取证系统工作,能够有效地提高交通管制的力度。
1 系统工作原理
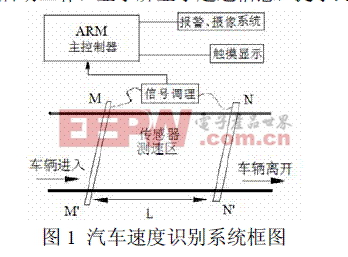
系统由调制式红外光传感器、飞利浦公司的LPC2294 ARM 嵌入式处理器,带触摸屏的彩色液晶显示器以及报警摄像等系统构成,如图1 所示。图1 中M、N 两点是路旁一侧护栏上的两点,分别安装着可发射38KHz 的红外发光管,一直向外发射调制式红外光。调制式红外光被另一侧护栏上相应的两点M’、N’处安放的光电接收器接收,共同组成一个光控测速区。当汽车达到N 点时,第二个光电探测器N-N’将光信号转换为电信号经信号调理电路送至ARM 处理器使计数器停止计数,t 的值就确定了。由M、N 两点间的距离L 除以t 便得到速度V。如果计算得到的V 值在设定的安全速度范围之内,显示屏则显示当前安全速度值,摄像、报警电路就不工作;如果V 值超出设定范围之外,则计算速度偏移量△V =Vmax—V,同时显示该车辆超速行驶,并让摄像、报警电路启动工作。同理,若车辆以V《Vmin 的低速状态通过光控测速区时,照相及报警系统亦启动工作,显示屏显示超速信息,提示此时车辆处于超低速行驶状态。
2 系统硬件设计
2.1 光电发射接收系统
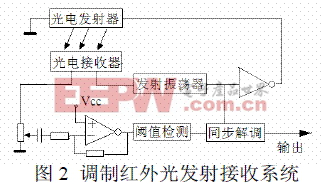
光电发射接收系统原理如图2 所示。振荡器产生频率为38KHz 的信号, 驱动红外发光管发光。光电接收器则接收红外发光管射出的光脉冲,接收到的光脉冲信号经调节电位器连接到检测器的输入端。将接收到的调制式光脉冲信号送入放大器进行放大,经阈值检测后变成与同步振荡器同步输出的逻辑电平脉冲,再通过脉冲同步解调,得到与车辆运动状态相关的光电信号,并经缓冲输出。
2.2 信号接收与定时器工作
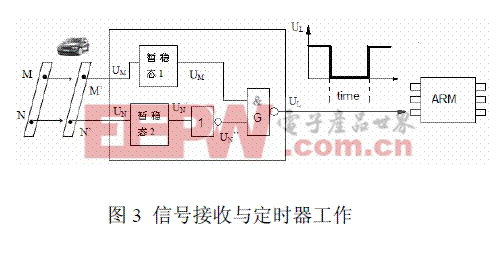
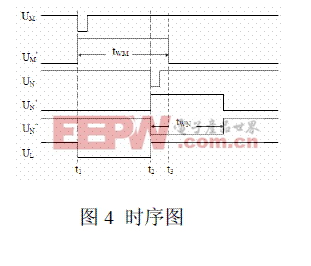
如图3 所示,在没有车辆经过光控测速区时,M’、N’两点一直能接收到38KHz 的调制红外光,均输出高电平,暂稳态电路均处在稳态。门G 的输出为逻辑1,UL 始终为高电平。当有车辆通过光控测速区时,M 点发出的光线首先被阻断,UM 由高电平先变为低电平,暂稳态电路1 被触发而进入暂稳态,如图4 中的t1 时刻之后所示。
2.3 ARM 核心板及触摸显示系统
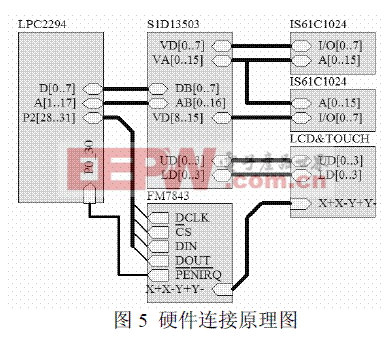
系统核心板采用DEVICEARM2200 工控板, 其内嵌飞利浦公司的LPC2294ARM7TDMI-S 嵌入式处理器,最高频率60MHz,并带有8M PSRAM 存储器和16M NANDFlash,性能完全满足高速车速测量系统的要求。由于其较小的封装、极低的功耗,可使用电池供电,因此十分适合于野外无外接电源的情况下工作。电路连接如图 5 所示:显示屏选用320×240 彩色液晶屏,将液晶控制器S1D13503 的AB0 至AB16 与LPC2294 的地址总线A1 至A17 相连,以16 位总线方式操作;S1D13503的数据总线DB0 至DB7 接LPC2294 的外部存储器数据线D0 至D7, DB8 至DB15 接VDD,实现与LPC2294 的8 位数据总线连接;其硬件配置由两片高速CMOS 静态存储器IS61C1024对S1D13503 的VD0 至VD15 来完成。四线电阻式触摸屏可检测到触摸信号并通过触摸屏控制器FM7843 将模拟信号转换为位置坐标数据,传递给LPC2294 进行处理。
3 系统软件设计
3.1 uclinux 系统移植
虽然当前 uclinux 已经支持无MMU 的ARM 体系结构,但由于具体使用的ARM 处理器芯片存储系统不同、片内的外设不同、中断系统也不同,因此需添加或修改LPC2294 芯片相关的具体代码。
3.2 设备驱动程序设计
由于uclinux 2.4.x内核为非抢占式,进程时间片为10ms,本身实时性并不高。设备信息结构体用来描述该设备的open、release、read等操作方法:其中,在系统和应用程序首次使用此定时器时,首先执行timer1_open(struct inode *inode, struct file *filp) 方法调用request_irq(IRQ_timer1, timer1_irq_handle, SA_INTERRUPT, “my” DEVICE_NAME, NULL)函数进行中断响应函数注册,配置定时器T1IR、T1PR、T1TC、T1TCR等寄存器完成定时器初始化,使用中断开关函数local_irq_save()和local_irq_restore()来控制临界区;最终由uclinux系统接收硬件中断并调用中断服务程序;当系统和应用程序不再使用该定时器时调用timer1_release(struct inode *inode, struct
- 基于DSP的数字式MEMS加速度传感器的设计与应用(04-17)
- 基于TMS320VC33速度控制系统硬件平台设计(07-02)
- ARM和DSP设计的地震加速度信号处理系统(01-04)
- Windows CE 6.0 Multi-bin的设计与实现(03-06)
- DSP在三相无刷直流电机中的应用 (07-18)
- TMS320VC5402与51单片机的接口设计 (07-19)